从技术的角度,云原生架构是基于云原生技术的一组架构原则和设计模式的集合,旨在将云应用中的 非业务代码部分进行最大化的剥离,从而让云设施接管应用中原有的大量非功能特性(如弹性、韧性、安全、 可观测性、灰度等),使业务不再有非功能性业务中断困扰的同时,具备轻量、敏捷、高度自动化的特点。
从微服务到云原生
云原生定义(Cloud Native Definition)
Cloud native technologies empower organizations to build and run scalable applications in modern, dynamic environments such as public, private, and hybrid clouds. Containers, service meshes, microservices, immutable infrastructure, and declarative APIs exemplify this approach.
These techniques enable loosely coupled systems that are resilient, manageable, and observable. Combined with robust automation, they allow engineers to make high-impact changes frequently and predictably with minimal toil.
云原生技术有利于各组织在公有云、私有云和混合云等新型动态环境中,构建和运行可弹性扩展的应用。云原生的代表技术包括容器、服务网格、微服务、不可变基础设施和声明式 API。
这些技术能够构建容错性好、易于管理和便于观察的松耦合系统。结合可靠的自动化手段,云原生技术使工程师能够轻松地对系统作出频繁和可预测的重大变更。
—— Cloud Native Definition, CNCF,2018
“不可变基础设施”这个概念由来已久。2012 年 Martin Fowler 设想的“凤凰服务器”与 2013 年 Chad Fowler 正式提出的“不可变基础设施,都阐明了基础设施不变性所能带来的益处。在云原生基金会定义的“云原生”概念中,“不可变基础设施”提升到了与微服务平级的重要程度,此时它的内涵已不再局限于方便运维、程序升级和部署的手段,而是升华为向应用代码隐藏分布式架构复杂度、让分布式架构得以成为一种可普遍推广的普适架构风格的必要前提。
虚拟化容器
容器是云计算、微服务等诸多软件业界核心技术的共同基石,容器的首要目标是让软件分发部署过程从传统的发布安装包、靠人工部署转变为直接发布已经部署好的、包含整套运行环境的虚拟化镜像。在容器技术成熟之前,主流的软件部署过程是由系统管理员编译或下载好二进制安装包,根据软件的部署说明文档准备好正确的操作系统、第三方库、配置文件、资源权限等各种前置依赖以后,才能将程序正确地运行起来。Chad Fowler在提出“不可变基础设施”这个概念的文章《Trash Your Servers and Burn Your Code》里,开篇就直接吐槽:要把一个不知道打过多少个升级补丁,不知道经历了多少任管理员的系统迁移到其他机器上,毫无疑问会是一场灾难。
让软件能够在任何环境、任何物理机器上达到“一次编译,到处运行”曾是 Java 早年的宣传口号,这并不是一个简单的目标,不设前提的“到处运行”,仅靠 Java 语言和 Java 虚拟机是不可能达成的,因为一个计算机软件要能够正确运行,需要有以下三方面的兼容性来共同保障(这里仅讨论软件兼容性,不去涉及“如果没有摄像头就无法运行照相程序”这类问题):
- ISA 兼容:目标机器指令集兼容性,譬如 ARM 架构的计算机无法直接运行面向 x86 架构编译的程序。
- ABI 兼容:目标系统或者依赖库的二进制兼容性,譬如 Windows 系统环境中无法直接运行 Linux 的程序,又譬如 DirectX 12 的游戏无法运行在 DirectX 9 之上。
- 环境兼容:目标环境的兼容性,譬如没有正确设置的配置文件、环境变量、注册中心、数据库地址、文件系统的权限等等,任何一个环境因素出现错误,都会让你的程序无法正常运行。
额外知识:ISA 与 ABI
指令集架构(Instruction Set Architecture,ISA)是计算机体系结构中与程序设计有关的部分,包含了基本数据类型,指令集,寄存器,寻址模式,存储体系,中断,异常处理以及外部 I/O。指令集架构包含一系列的 Opcode 操作码(即通常所说的机器语言),以及由特定处理器执行的基本命令。
应用二进制接口(Application Binary Interface,ABI)是应用程序与操作系统之间或其他依赖库之间的低级接口。ABI 涵盖了各种底层细节,如数据类型的宽度大小、对象的布局、接口调用约定等等。ABI 不同于应用程序接口(Application Programming Interface,API),API 定义的是源代码和库之间的接口,因此同样的代码可以在支持这个 API 的任何系统中编译,而 ABI 允许编译好的目标代码在使用兼容 ABI 的系统中无需改动就能直接运行。
笔者把使用仿真(Emulation)以及虚拟化(Virtualization)技术来解决以上三项兼容性问题的方法都统称为虚拟化技术。根据抽象目标与兼容性高低的不同,虚拟化技术又分为下列五类:
- 指令集虚拟化(ISA Level Virtualization)。通过软件来模拟不同 ISA 架构的处理器工作过程,将虚拟机发出的指令转换为符合本机 ISA 的指令,代表为QEMU和Bochs。指令集虚拟化就是仿真,能提供了几乎完全不受局限的兼容性,甚至能做到直接在 Web 浏览器上运行完整操作系统这种令人惊讶的效果,但由于每条指令都要由软件来转换和模拟,它也是性能损失最大的虚拟化技术。
- 硬件抽象层虚拟化(Hardware Abstraction Level Virtualization)。以软件或者直接通过硬件来模拟处理器、芯片组、内存、磁盘控制器、显卡等设备的工作过程。既可以使用纯软件的二进制翻译来模拟虚拟设备,也可以由硬件的Intel VT-d、AMD-Vi)这类虚拟化技术,将某个物理设备直通(Passthrough)到虚拟机中使用,代表为VMware ESXi和Hyper-V。如果没有预设语境,一般人们所说的“虚拟机”就是指这一类虚拟化技术。
- 操作系统层虚拟化(OS Level Virtualization)。无论是指令集虚拟化还是硬件抽象层虚拟化,都会运行一套完全真实的操作系统来解决 ABI 兼容性和环境兼容性问题,虽然 ISA 兼容性是虚拟出来的,但 ABI 兼容性和环境兼容性却是真实存在的。而操作系统层虚拟化则不会提供真实的操作系统,而是采用隔离手段,使得不同进程拥有独立的系统资源和资源配额,看起来仿佛是独享了整个操作系统一般,其实系统的内核仍然是被不同进程所共享的。
操作系统层虚拟化的另一个名字就是本章的主角“容器化”(Containerization),由此可见,容器化仅仅是虚拟化的一个子集,只能提供操作系统内核以上的部分 ABI 兼容性与完整的环境兼容性。这意味着如果没有其他虚拟化手段的辅助,在 Windows 系统上是不可能运行 Linux 的 Docker 镜像的(现在可以,是因为有其他虚拟机或者 WSL2 的支持),反之亦然。也同样决定了如果 Docker 宿主机的内核版本是 Linux Kernel 5.6,那无论上面运行的镜像是 Ubuntu、RHEL、Fedora、Mint 或者任何发行版的镜像,看到的内核一定都是相同的 Linux Kernel 5.6。容器化牺牲了一定的隔离性与兼容性,换来的是比前两种虚拟化更高的启动速度、运行性能和更低的执行负担。 - 运行库虚拟化(Library Level Virtualization)。与操作系统虚拟化采用隔离手段来模拟系统不同,运行库虚拟化选择使用软件翻译的方法来模拟系统,它以一个独立进程来代替操作系统内核来提供目标软件运行所需的全部能力,这种虚拟化方法获得的 ABI 兼容性高低,取决于软件是否能足够准确和全面地完成翻译工作,其代表为WINE(Wine Is Not an Emulator 的缩写,一款在 Linux 下运行 Windows 程序的软件)和WSL(特指 Windows Subsystem for Linux Version 1)。
- 语言层虚拟化(Programming Language Level Virtualization)。由虚拟机将高级语言生成的中间代码转换为目标机器可以直接执行的指令,代表为 Java 的 JVM 和.NET 的 CLR。虽然厂商肯定会提供不同系统下都有相同接口的标准库,但本质上这种虚拟化并不直接解决任何 ABI 兼容性和环境兼容性问题。
容器的崛起
容器的最初的目的不是为了部署软件,而是为了隔离计算机中的各类资源,以便降低软件开发、测试阶段可能产生的误操作风险,或者专门充当蜜罐),吸引黑客的攻击,以便监视黑客的行为。下面,笔者将以容器发展历史为线索,介绍容器技术在不同历史阶段中的主要关注点。
隔离文件:chroot
容器的起点可以追溯到 1979 年Version 7 UNIX系统中提供的chroot命令,这个命令是英文单词“Change Root”的缩写,功能是当某个进程经过chroot操作之后,它的根目录就会被锁定在命令参数所指定的位置,以后它或者它的子进程将不能再访问和操作该目录之外的其他文件。
1991 年,世界上第一个监控黑客行动的蜜罐程序就是使用chroot来实现的,那个参数指定的根目录当时被作者戏称为“Chroot 监狱”(Chroot Jail),黑客突破chroot限制的方法就称为 Jailbreak。后来,FreeBSD 4.0 系统重新实现了chroot命令,用它作为系统中进程沙箱隔离的基础,并将其命名为FreeBSD jail,再后来,苹果公司又以 FreeBSD 为基础研发出了举世闻名的 iOS 操作系统,此时,黑客们就将绕过 iOS 沙箱机制以 root 权限任意安装程序的方法称为“越狱”(Jailbreak),这些故事都是题外话了。
2000 年,Linux Kernel 2.3.41 版内核引入了pivot_root技术来实现文件隔离,pivot_root直接切换了根文件系统(rootfs),有效地避免了chroot命令可能出现的安全性漏洞。本文后续提到的容器技术,如 LXC、Docker 等也都是优先使用pivot_root来实现根文件系统切换的。
时至今日,chroot命令依然活跃在 UNIX 系统与几乎所有主流的 Linux 发行版中,同时以命令行工具(chroot(8))或者系统调用(chroot(2))的形式存在,但无论是chroot命令抑或是pivot_root,都并不能提供完美的隔离性。原本按照 UNIX 的设计哲学,一切资源都可以视为文件(In UNIX,Everything is a File),一切处理都可以视为对文件的操作,理论上,只要隔离了文件系统,一切资源都应该被自动隔离才对。可是哲学归哲学,现实归现实,从硬件层面暴露的低层次资源,如磁盘、网络、内存、处理器,到经操作系统层面封装的高层次资源,如 UNIX 分时(UNIX Time-Sharing,UTS)、进程 ID(Process ID,PID)、用户 ID(User ID,UID)、进程间通信(Inter-Process Communication,IPC)都存在大量以非文件形式暴露的操作入口,因此,以chroot为代表的文件隔离,仅仅是容器崛起之路的起点而已。
隔离访问:namespaces
2002 年,Linux Kernel 2.4.19 版内核引入了一种全新的隔离机制:Linux 名称空间(Linux Namespaces)。名称空间的概念在很多现代的高级程序语言中都存在,用于避免不同开发者提供的 API 相互冲突,相信作为一名开发人员的你肯定不陌生。
Linux 的名称空间是一种由内核直接提供的全局资源封装,是内核针对进程设计的访问隔离机制。进程在一个独立的 Linux 名称空间中朝系统看去,会觉得自己仿佛就是这方天地的主人,拥有这台 Linux 主机上的一切资源,不仅文件系统是独立的,还有着独立的 PID 编号(譬如拥有自己的 0 号进程,即系统初始化的进程)、UID/GID 编号(譬如拥有自己独立的 root 用户)、网络(譬如完全独立的 IP 地址、网络栈、防火墙等设置),等等,此时进程的心情简直不能再好了。
Linux 的名称空间是受“贝尔实验室九号项目”(一个分布式操作系统,“九号”项目并非代号,操作系统的名字就叫“Plan 9 from Bell Labs”,充满了赛博朋克风格)的启发而设计的,最初的目的依然只是为了隔离文件系统,而非为了什么容器化的实现。这点从 2002 年发布时只提供了 Mount 名称空间,并且其构造参数为“CLONE_NEWNS”(即 Clone New Namespace 的缩写)而非“CLONE_NEWMOUNT”便能看出一些端倪。后来,要求系统隔离其他访问操作的呼声愈发强烈,从 2006 年起,内核陆续添加了 UTS、IPC 等名称空间隔离,直到目前最新的 Linux Kernel 5.6 版内核为止,Linux 名称空间支持以下八种资源的隔离(内核的官网Kernel.org上仍然只列出了前六种,从 Linux 的 Man 命令能查到全部八种)。
表 11-1 Linux 名称空间支持以下八种资源的隔离
| 名称空间 | 隔离内容 | 内核版本 |
|---|---|---|
| Mount | 隔离文件系统,功能上大致可以类比chroot |
2.4.19 |
| UTS | 隔离主机的Hostname、Domain names | 2.6.19 |
| IPC | 隔离进程间通信的渠道(详见“远程服务调用”中对 IPC 的介绍) | 2.6.19 |
| PID | 隔离进程编号,无法看到其他名称空间中的 PID,意味着无法对其他进程产生影响 | 2.6.24 |
| Network | 隔离网络资源,如网卡、网络栈、IP 地址、端口,等等 | 2.6.29 |
| User | 隔离用户和用户组 | 3.8 |
| Cgroup | 隔离cgroups信息,进程有自己的cgroups的根目录视图(在/proc/self/cgroup 不会看到整个系统的信息)。cgroups的话题很重要,稍后笔者会安排一整节来介绍 |
4.6 |
| Time | 隔离系统时间,2020 年 3 月最新的 5.6 内核开始支持进程独立设置系统时间 | 5.6 |
如今,对文件、进程、用户、网络等各类信息的访问,都被囊括在 Linux 的名称空间中,即使今天仍有一些没被隔离的访问(譬如syslog就还没被隔离,容器内可以看到容器外其他进程产生的内核 syslog),日后也可以随内核版本的更新纳入到这套框架之内,现在距离完美的隔离性就只差最后一步了:资源的隔离。
隔离资源:cgroups
如果要让一台物理计算机中的各个进程看起来像独享整台虚拟计算机的话,不仅要隔离各自进程的访问操作,还必须能独立控制分配给各个进程的资源使用配额,不然的话,一个进程发生了内存溢出或者占满了处理器,其他进程就莫名其妙地被牵连挂起,这样肯定算不上是完美的隔离。
Linux 系统解决以上问题的方案是控制群组(Control Groups,目前常用的简写为cgroups),它与名称空间一样都是直接由内核提供的功能。具体来说,CGroups 提供了以下四个功能。
- 资源限制(Resource Limitation):CGroups 可以对进程组使用的资源总额进行限制,可以设定应用运行时使用内存的上限,一旦超过这个上限就发出 OOM(Out of Memory)信息。资源配额包括处理器时间、内存大小、磁盘 I/O 速度,等等,具体可以参见表 11-2 所示,我们也可以在文件目录
/sys/fs/cgroup/cpuset中看到内核态的映射。 - 优先级分配(Prioritization):CGroups 会对不同进程分配 CPU 时间片数量及硬盘 I/O 带宽,实际上就相当于控制了进程运行的优先级。
- 资源统计(Accounting):CGroups 可以统计系统的资源使用量,如 CPU 使用时长、内存用量等,这个功能非常适用于计费。
- 进程控制(Control):CGroups 可以对进程组执行挂起、恢复等操作。
本质上来说,CGroups 是内核附加在程序上的一系列钩子(hook),通过程序运行时对资源的调度触发相应的钩子以达到资源追踪和限制的目的。
表 11-2 Linux 控制群组子系统
| 控制组子系统 | 功能 |
|---|---|
| blkio | 为块设备(如磁盘,固态硬盘,USB 等等)设定 I/O 限额。 |
| cpu | 控制cgroups中进程的处理器占用比率。 |
| cpuacct | 自动生成cgroups中进程所使用的处理器时间的报告。 |
| cpuset | 为cgroups中的进程分配独立的处理器(包括多路系统的处理器,多核系统的处理器核心)。 |
| devices | 设置cgroups中的进程访问某个设备的权限(读、写、创建三种权限)。 |
| freezer | 挂起或者恢复cgroups中的进程。 |
| memory | 设定cgroups中进程使用内存的限制,并自动生成内存资源使用报告。 |
| net_cls | 使用等级识别符标记网络数据包,可允许 Linux 流量控制程序识别从具体 cgroups中生成的数据包。 |
| net_prio | 用来设置网络流量的优先级。 |
| hugetlb | 主要针对于 HugeTLB 系统进行限制。 |
| perf_event | 允许 Perf 工具基于cgroups分组做性能监测。 |
cgroups项目最早是由 Google 的工程师(主要是 Paul Menage 和 Rohit Seth)在 2006 年发起的,当时取的名字就叫作“进程容器”(Process Containers),不过“容器”(Container)这个名词的定义在那时候尚不如今天清晰,不同场景中常有不同所指,为避免混乱,2007 年这个项目才被重命名为cgroups,在 2008 年合并到 2.6.24 版的内核后正式对外发布,这一阶段的cgroups被称为“第一代cgroups”。2016 年 3 月发布的 Linux Kernel 4.5 中,搭载了由 Facebook 工程师(主要是 Tejun Heo)重新编写的“第二代cgroups”,其关键改进是支持统一层级管理(Unified Hierarchy),使得管理员能更加清晰精确地控制资源的层级关系。目前这两个版本的cgroups在 Linux 内核代码中是并存的,稍后介绍的 Docker 暂时仅支持第一代的cgroups。
封装系统:LXC
当文件系统、访问、资源都可以被隔离后,容器已经有它降生所需的全部前置支撑条件,并且 Linux 的开发者们也已经明确地看到了这一点。为降低普通用户综合使用namespaces、cgroups这些低级特性的门槛,2008 年 Linux Kernel 2.6.24 内核刚刚开始提供cgroups的同一时间,就马上发布了名为Linux 容器(LinuX Containers,LXC)的系统级虚拟化功能。
此前,在 Linux 上并不是没有系统级虚拟化的解决方案,譬如传统的OpenVZ和Linux-VServer都能够实现容器隔离,并且只会有很低的性能损失(按 OpenVZ 提供的数据,只会有 1-3%的损失),但它们都是非官方的技术,使用它们最大的阻碍是系统级虚拟化必须要有内核的支持,为此它们就只能通过非官方内核补丁的方式修改标准内核,才能获得那些原本在内核中不存在的能力。
LXC 带着令人瞩目的光环登场,它的出现促使“容器”从一个阳春白雪的只流传于开发人员口中的技术词汇,逐渐向整个软件业的公共概念、共同语言发展,就如同今天的“服务器”、“客户端”和“互联网”一样。相信你现在肯定会好奇为什么现在一提到容器,大家首先联想到的是 Docker 而不是 LXC?为什么去问 10 个开发人员,至少有 9 个听过 Docker,但如果问 LXC,可能只有 1 个人会听说过?
LXC 的出现肯定受到了 OpenVZ 和 Linux-VServer 的启发,摸着巨人的肩膀过河这并没有什么不对。可惜的是,LXC 在设定自己的发展目标时,也被前辈们的影响所局限住。LXC 眼中的容器的定义与 OpenVZ 和 Linux-VServer 并无差别,是一种封装系统的轻量级虚拟机,而 Docker 眼中的容器的定义则是一种封装应用的技术手段。这两种封装理念在技术层面并没有什么本质区别,但应用效果就差异巨大。举个具体例子,如果你要建设一个LAMP)(Linux、Apache、MySQL、PHP)应用,按照 LXC 的思路,你应该先编写或者寻找到LAMP 的 template(可以暂且不准确地类比为 LXC 版本的 Dockerfile 吧),以此构造出一个安装了 LAMP 的虚拟系统。如果按部署虚拟机的角度来看,这还算挺方便的,作为那个时代(距今也就十年)的系统管理员,所有软件、补丁、配置都是自己搞定的,部署一台新虚拟机要花费一两天时间都很正常,有 LXC 的 template,一下子帮你把 LAMP 都安装好了,还想要啥自行车?但是,作为一名现代的系统管理员,这里问题就相当大,如果我想把 LAMP 改为 LNMP(Linux、Nginx、MySQL、PHP)该怎么办?如果我想把 LAMP 里的 MySQL 5 调整为 MySQL 8 该怎么办?都得找到或者自己编写新的 template 来解决。好吧,那这台机的软件、版本都配置对了,下一台机我要构建LYME)或者MEAN),又该怎么办?以封装系统为出发点,仍是按照先装系统然再装软件的思路,就永远无法做到一两分钟甚至十几秒钟就构造出一个合乎要求的软件运行环境,也决定了 LXC 不可能形成今天的容器生态的,所以,接下来舞台的聚光灯终于落到了 Docker 身上。
封装应用:Docker
2013 年宣布开源的 Docker 毫无疑问是容器发展历史上里程碑式的发明,然而 Docker 的成功似乎没有太多技术驱动的成分。至少对开源早期的 Docker 而言,确实没有什么能构成壁垒的技术。它的容器化能力直接来源于 LXC,它镜像分层组合的文件系统直接来源于 AUFS,Docker 开源后不久,就有人仅用了一百多行 Shell 脚本便实现了 Docker 的核心功能(名为 Bocker)。
那为何历史选择了 Docker,而不是 LXC 或者其他容器技术呢?对于这个问题,笔者引用(转述非直译,有所精简)DotCloud 公司(当年创造 Docker 的公司,已于 2016 年倒闭)创始人 Solomon Hykes 在Stackoverflow 上的一段问答:
为什么要用 Docker 而不是 LXC?(Why would I use Docker over plain LXC?)
Docker 除了包装来自 Linux 内核的特性之外,它的价值还在于:
- 跨机器的绿色部署:Docker 定义了一种将应用及其所有的环境依赖都打包到一起的格式,仿佛它原本就是绿色软件一样。LXC 并没有提供这样的能力,使用 LXC 部署的新机器很多细节都依赖人的介入,虚拟机的环境几乎肯定会跟你原本部署程序的机器有所差别。
- 以应用为中心的封装:Docker 封装应用而非封装机器的理念贯穿了它的设计、API、界面、文档等多个方面。相比之下,LXC 将容器视为对系统的封装,这局限了容器的发展。
- 自动构建:Docker 提供了开发人员从在容器中构建产品的全部支持,开发人员无需关注目标机器的具体配置,即可使用任意的构建工具链,在容器中自动构建出最终产品。
- 多版本支持:Docker 支持像 Git 一样管理容器的连续版本,进行检查版本间差异、提交或者回滚等操作。从历史记录中你可以查看到该容器是如何一步一步构建成的,并且只增量上传或下载新版本中变更的部分。
- 组件重用:Docker 允许将任何现有容器作为基础镜像来使用,以此构建出更加专业的镜像。
- 共享:Docker 拥有公共的镜像仓库,成千上万的 Docker 用户在上面上传了自己的镜像,同时也使用他人上传的镜像。
- 工具生态:Docker 开放了一套可自动化和自行扩展的接口,在此之上,还有很多工具来扩展其功能,譬如容器编排、管理界面、持续集成等等。
- —— Solomon Hykes,Stackoverflow,2013
从开源到现在也只过了短短数年时间,Docker 已成为软件开发、测试、分发、部署等各个环节都难以或缺的基础支撑,自身的架构也发生了相当大的改变,Docker 被分解为由 Docker Client、Docker Daemon、Docker Registry、Docker Container 等子系统,以及 Graph、Driver、libcontainer 等各司其职的模块组成,此时再说一百多行脚本能实现 Docker 核心功能,再说 Docker 没有太高的技术含量,就已经不再合适了。
2014 年,Docker 开源了自己用 Golang 开发的 libcontainer,这是一个越过 LXC 直接操作namespaces和cgroups的核心模块,有了 libcontainer 以后,Docker 就能直接与系统内核打交道,不必依赖 LXC 来提供容器化隔离能力了。
2015 年,在 Docker 的主导和倡议下,多家公司联合制定了“开放容器交互标准”(Open Container Initiative,OCI),这是一个关于容器格式和运行时的规范文件,其中包含运行时标准(runtime-spec )、容器镜像标准(image-spec)和镜像分发标准(distribution-spec,分发标准还未正式发布)。运行时标准定义了应该如何运行一个容器、如何管理容器的状态和生命周期、如何使用操作系统的底层特性(namespaces、cgroup、pivot_root等);容器镜像标准规定了容器镜像的格式、配置、元数据的格式,可以理解为对镜像的静态描述;镜像分发标准则规定了镜像推送和拉取的网络交互过程。
为了符合 OCI 标准,Docker 推动自身的架构继续向前演进,首先将 libcontainer 独立出来,封装重构成runC 项目,并捐献给了 Linux 基金会管理。runC 是 OCI Runtime 的首个参考实现,提出了“让标准容器无所不在”(Make Standard Containers Available Everywhere)的口号。为了能够兼容所有符合标准的 OCI Runtime 实现,Docker 进一步重构了 Docker Daemon 子系统,将其中与运行时交互的部分抽象为containerd 项目,这是一个负责管理容器执行、分发、监控、网络、构建、日志等功能的核心模块,内部会为每个容器运行时创建一个 containerd-shim 适配进程,默认与 runC 搭配工作,但也可以切换到其他 OCI Runtime 实现上(然而实际并没做到,最后 containerd 仍是紧密绑定于 runC)。2016 年,Docker 把 containerd 捐献给了 CNCF 管理,runC 与 containerd 两个项目的捐赠托管,即带有 Docker 对开源信念的追求,也带有 Docker 在众多云计算大厂夹击下自救的无奈,这两个项目将成为未来 Docker 消亡和存续的伏笔(看到本节末尾你就能理解这句矛盾的话了)。
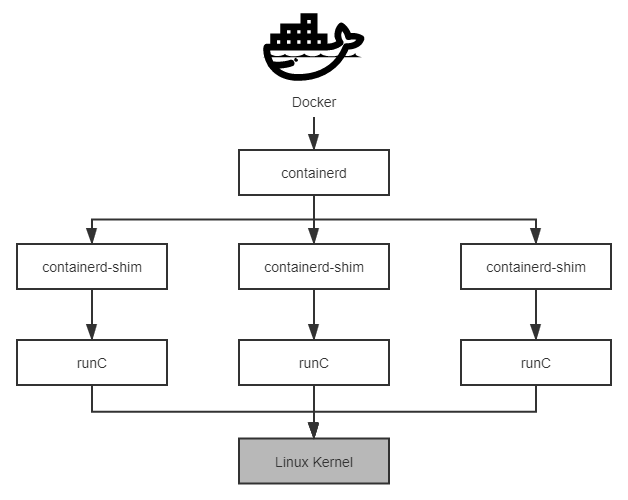
图 11-2 Docker、containerd 和 runC 的交互关系
以上笔者列举的这些 Docker 推动的开源与标准化工作,既是对 Docker 为开源乃至整个软件业做出贡献的赞赏,也是为后面介绍容器编排时,讲述当前容器引擎的混乱关系做的前置铺垫。Docker 目前无疑在容器领域具有统治地位,但统治的稳固程度不仅没到高枕无忧,说是危机四伏都不为过。目前已经有了可见的、足以威胁动摇 Docker 地位的潜在可能性正在酝酿,风险源于虽然 Docker 赢得了容器战争,但 Docker Swarm 却输掉了容器编排战争。从结果回望当初,Docker 赢得容器战争有一些偶然,Docker Swarm 输掉的编排战争却是必然的。
封装集群:Kubernetes
如果说以 Docker 为代表的容器引擎将软件的发布流程从分发二进制安装包转变为直接分发虚拟化后的整个运行环境,令应用得以实现跨机器的绿色部署;那以 Kubernetes 为代表的容器编排框架,就是把大型软件系统运行所依赖的集群环境也进行了虚拟化,令集群得以实现跨数据中心的绿色部署,并能够根据实际情况自动扩缩。
Kubernetes 可谓出身名门,前身是 Google 内部已运行多年的集群管理系统 Borg,2014 年 6 月使用 Golang 完全重写后开源。自诞生之日起,只要与云计算能稍微扯上关系的业界巨头都对 Kubernetes 争相追捧,IBM、RedHat、Microsoft、VMware 和华为都是它最早期的代码贡献者。此时,云计算从实验室到工业化应用已经有十个年头,然而大量应用使用云计算的方式仍停滞在传统 IDC(Internet Data Center)时代,仅仅是用云端的虚拟机代替了传统的物理机。尽管早在 2013 年,Pivotal(持有着 Spring Framework 和 Cloud Foundry 的公司)就提出了“云原生”的概念,但是要实现服务化、具备韧性(Resilience)、弹性(Elasticity)、可观测性(Observability)的软件系统十分困难,在当时基本只能依靠架构师和程序员高超的个人能力,云计算本身帮不上什么忙。在云的时代不能充分利用云的强大能力,这让云计算厂商无比遗憾,也无比焦虑。直到 Kubernetes 横空出世,大家终于等到了破局的希望,认准了这就是云原生时代的操作系统,是让复杂软件在云计算下获得韧性、弹性、可观测性的最佳路径,也是为厂商们推动云计算时代加速到来的关键引擎之一。
2015 年 7 月,Kubernetes 发布了第一个正式版本 1.0 版,更重要的事件是 Google 宣布与 Linux 基金会共同筹建云原生基金会(Cloud Native Computing Foundation,CNCF),并且将 Kubernetes 托管到 CNCF,成为其第一个项目。随后,Kubernetes 以摧枯拉朽之势覆灭了容器编排领域的其他竞争对手,哪怕 Docker Swarm 有着 Docker 在容器引擎方面的先天优势,DotCloud 后来甚至将 Swarm 直接内置入 Docker 之中都未能稍稍阻挡 Kubernetes 的前进的步伐。
Kubernetes 的成功与 Docker 的成功并不相同,Docker 靠的是优秀的理念,以一个“好点子”引爆了一个时代。笔者相信就算没有 Docker 也会有 Cocker 或者 Eocker 的出现,但由成立仅三年的 DotCloud 公司(三年后又倒闭)做成了这样的产品确实有一定的偶然性。而 Kubernetes 的成功不仅有 Google 深厚的技术功底作支撑,有领先时代的设计理念,更加关键的是 Kubernetes 的出现符合所有云计算大厂的切身利益,有着业界巨头不遗余力的广泛支持,它的成功便是一种必然。
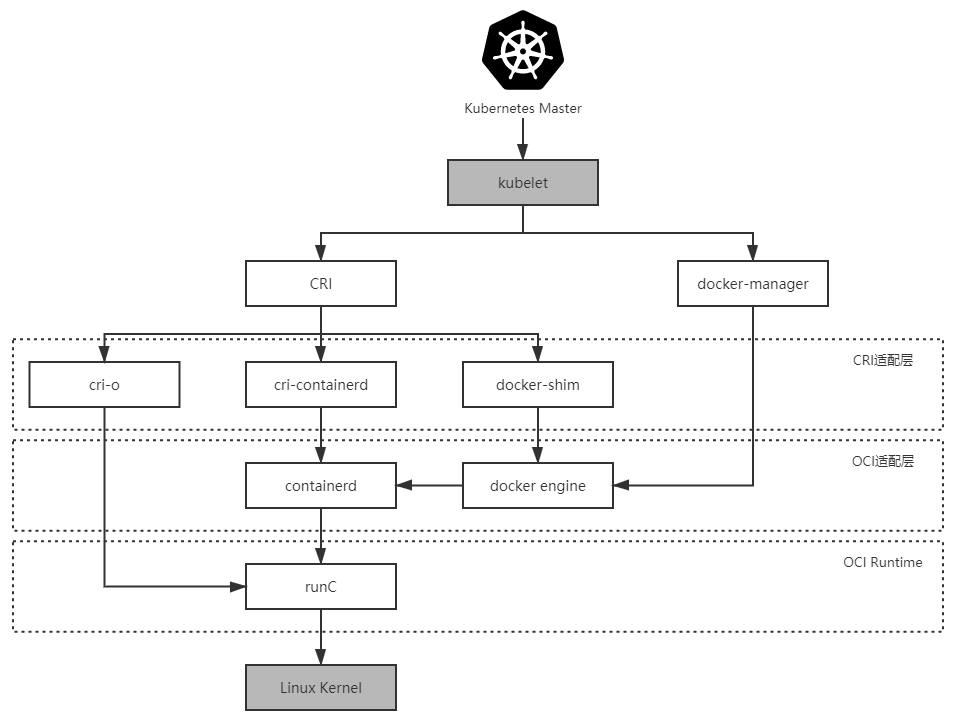
图 11-3 Kubernetes 与容器引擎的调用关系
Kubernetes 与 Docker 两者的关系十分微妙,把握住两者关系的变化过程,是理解 Kubernetes 架构演变与 CRI、OCI 规范的良好线索。在 Kubernetes 开源的早期,它是完全依赖且绑定 Docker 的,并没有过多考虑够日后有使用其他容器引擎的可能性。直至 Kubernetes 1.5 之前,Kubernetes 管理容器的方式都是通过内部的 DockerManager 向 Docker Engine 以 HTTP 方式发送指令,通过 Docker 来操作镜像的增删改查的,如上图最右边线路的箭头所示(图中的 kubelet 是集群节点中的代理程序,负责与管理集群的 Master 通信,其他节点的含义在后文介绍到时都会有解释)。将这个阶段 Kubernetes 与容器引擎的调用关系捋直,并结合上一节提到的 Docker 捐献 containerd 与 runC 后重构的调用,完整的调用链条如下所示:
Kubernetes Master → kubelet → DockerManager → Docker Engine → containerd → runC
2016 年,Kubernetes 1.5 版本开始引入“容器运行时接口”(Container Runtime Interface,CRI),这是一个定义容器运行时应该如何接入到 kubelet 的规范标准,从此 Kubernetes 内部的 DockerManager 就被更为通用的 KubeGenericRuntimeManager 所替代(实际上在 1.6.6 之前都仍然可以看到 DockerManager),kubelet 与 KubeGenericRuntimeManager 之间通过 gRPC 协议通信。由于 CRI 是在 Docker 之后才发布的规范,Docker 是肯定不支持 CRI 的,所以 Kubernetes 又提供了 DockerShim 服务作为 Docker 与 CRI 的适配层,由它与 Docker Engine 以 HTTP 形式通信,实现了原来 DockerManager 的全部功能。此时,Docker 对 Kubernetes 来说只是一项默认依赖,而非之前的无可或缺了,它们的调用链为:
Kubernetes Master → kubelet → KubeGenericRuntimeManager → DockerShim → Docker Engine → containerd → runC
2017 年,由 Google、RedHat、Intel、SUSE、IBM 联合发起的CRI-O(Container Runtime Interface Orchestrator)项目发布了首个正式版本。从名字就可以看出,它肯定是完全遵循 CRI 规范进行实现的,另一方面,它可以支持所有符合 OCI 运行时标准的容器引擎,默认仍然是与 runC 搭配工作的,若要换成Clear Containers、Kata Containers等其他 OCI 运行时也完全没有问题。虽然开源版 Kubernetes 是使用 CRI-O、cri-containerd 抑或是 DockerShim 作为 CRI 实现,完全可以由用户自由选择(根据用户宿主机的环境选择),但在 RedHat 自己扩展定制的 Kubernetes 企业版,即OpenShift 4中,调用链已经没有了 Docker Engine 的身影:
Kubernetes Master → kubelet → KubeGenericRuntimeManager → CRI-O→ runC
由于此时 Docker 在容器引擎中的市场份额仍然占有绝对优势,对于普通用户来说,如果没有明确的收益,并没有什么动力要把 Docker 换成别的引擎,所以 CRI-O 即使摆出了直接挖掉 Docker 根基的凶悍姿势,其实也并没有给 Docker 带来太多即时可见的影响,不过能够想像此时 Docker 心中肯定充斥了难以言喻的危机感。
2018 年,由 Docker 捐献给 CNCF 的 containerd,在 CNCF 的精心孵化下发布了 1.1 版,1.1 版与 1.0 版的最大区别是此时它已完美地支持了 CRI 标准,这意味着原本用作 CRI 适配器的 cri-containerd 从此不再需要。此时,再观察 Kubernetes 到容器运行时的调用链,你会发现调用步骤会比通过 DockerShim、Docker Engine 与 containerd 交互的步骤要减少两步,这又意味着用户只要愿意抛弃掉 Docker 情怀的话,在容器编排上便可至少省略一次 HTTP 调用,获得性能上的收益,且根据 Kubernetes 官方给出的测试数据,这些免费的收益还相当地可观。Kubernetes 从 1.10 版本宣布开始支持 containerd 1.1,在调用链中已经能够完全抹去 Docker Engine 的存在:
Kubernetes Master → kubelet → KubeGenericRuntimeManager → containerd → runC
今天,要使用哪一种容器运行时取决于你安装 Kubernetes 时宿主机上的容器运行时环境,但对于云计算厂商来说,譬如国内的阿里云 ACK、腾讯云 TKE等直接提供的 Kubernetes 容器环境,采用的容器运行时普遍都已是 containerd,毕竟运行性能对它们来说就是核心生产力和竞争力。
未来,随着 Kubernetes 的持续发展壮大,Docker Engine 经历从不可或缺、默认依赖、可选择、直到淘汰是大概率事件,这件事情表面上是 Google、RedHat 等云计算大厂联手所为,实际淘汰它的还是技术发展的潮流趋势,就如同 Docker 诞生时依赖 LXC,到最后用 libcontainer 取代掉 LXC 一般。同时,我们也该看到事情的另一面,现在连 LXC 都还没有挂掉,反倒还发展出了更加专注于与 OpenVZ 等系统级虚拟化竞争的LXD,相信 Docker 本身也很难彻底消亡的,已经养成习惯的 CLI 界面,已经形成成熟生态的镜像仓库等都应该会长期存在,只是在容器编排领域,未来的 Docker 很可能只会以 runC 和 containerd 的形式存续下去,毕竟它们最初都源于 Docker 的血脉。
以容器构建系统
自从 Docker 提出“以封装应用为中心”的容器发展理念,成功取代了“以封装系统为中心”的 LXC 以后,一个容器封装一个单进程应用已经成为被广泛认可的最佳实践。然而单体时代过去之后,分布式系统里应用的概念已不再等同于进程,此时的应用需要多个进程共同协作,通过集群的形式对外提供服务,以虚拟化方法实现这个目标的过程就被称为容器编排(Container Orchestration)。
容器之间顺畅地交互通信是协作的核心需求,但容器协作并不仅仅是将容器以高速网络互相连接而已。如何调度容器,如何分配资源,如何扩缩规模,如何最大限度地接管系统中的非功能特性,让业务系统尽可能免受分布式复杂性的困扰都是容器编排框架必须考虑的问题,只有恰当解决了这一系列问题,云原生应用才有可能获得比传统应用更高的生产力。
隔离与协作
笔者并不打算过多介绍 Kubernetes 具体有哪些功能,向你说明 Kubernetes 由 Pod、Node、Deployment、ReplicaSet 等各种类型的资源组成可用的服务、集群管理平面与节点之间如何工作、每种资源该如何配置使用等等,并不是笔者的本意,如果你希望了解这方面信息,可以从 Kubernetes 官网的文档库或任何一本以 Kubernetes 为主题的使用手册中得到。
笔者真正希望说清楚的问题是“为什么 Kubernetes 会设计成现在这个样子?”、“为什么以容器构建系统应该这样做?”,寻找这些问题的答案最好是从它们设计的实现意图出发,为此,笔者虚构了一系列从简单到复杂的场景供你代入其中,理解并解决这些场景中的问题,并不要求你对 Kubernetes 已有多深入的了解,但要求你至少使用过 Kubernetes 和 Docker,基本了解它的核心功能与命令;此外还会涉及到一点儿 Linux 系统内核资源隔离的基础知识,别担心,只要你仔细读懂了上一节“容器的崛起”,就已经完全够用了。
现在就来设想一下,如果让你来设计一套容器编排系统,协调各种容器来共同来完成一项工作,会遇到什么问题?会如何着手解决?让我们从最简单的场景出发:
场景一:假设你现在有两个应用,其中一个是 Nginx,另一个是为该 Nginx 收集日志的 Filebeat,你希望将它们封装为容器镜像,以方便日后分发。
最直接的方案就将 Nginx 和 Filebeat 直接编译成同一个容器镜像,这是可以做到的,而且并不复杂,然而这样做会埋下很大隐患:它违背了 Docker 提倡的单个容器封装单进程应用的最佳实践。Docker 设计的 Dockerfile 只允许有一个 ENTRYPOINT,这并非无故添加的人为限制,而是因为 Docker 只能通过监视 PID 为 1 的进程(即由 ENTRYPOINT 启动的进程)的运行状态来判断容器的工作状态是否正常,容器退出执行清理,容器崩溃自动重启等操作都必须先判断状态。设想一下,即使我们使用了supervisord之类的进程控制器来解决同时启动 Nginx 和 Filebeat 进程的问题,如果因某种原因它们不停发生崩溃、重启,那 Docker 也无法察觉到,它只能观察到 supervisord 的运行状态,因此,以上需求会理所当然地演化成场景二。
场景二:假设你现在有两个 Docker 镜像,其中一个封装了 HTTP 服务,为便于称呼,我们叫它 Nginx 容器,另一个封装了日志收集服务,我们叫它 Filebeat 容器。现在要求 Filebeat 容器能收集 Nginx 容器产生的日志信息。
场景二依然不难解决,只要在 Nginx 容器和 Filebeat 容器启动时,分别将它们的日志目录和收集目录挂载为宿主机同一个磁盘位置的 Volume 即可,这种操作在 Docker 中是十分常用的容器间信息交换手段。不过,容器间信息交换不仅仅是文件系统,假如此时我又引入了一个新的工具confd——Linux 下的一种配置管理工具,作用是根据配置中心(Etcd、ZooKeeper、Consul)的变化自动更新 Nginx 的配置,这里便又会遇到新的问题。confd 需要向 Nginx 发送 HUP 信号以便通知 Nginx配置已经发生了变更,而发送 HUP 信号自然要求 confd 与 Nginx 能够进行 IPC 通信才行。尽管共享 IPC 名称空间不如共享 Volume 常见,但 Docker 同样支持了该功能,docker run 提供了--ipc参数,用于把多个容器挂载到同一个父容器的 IPC 名称空间之下,以实现容器间共享 IPC 名称空间的需求。类似地,如果要共享 UTS 名称空间,可以使用--uts参数,要共享网络名称空间的话,就使用--net参数。
以上便是 Docker 针对场景二这种不跨机器的多容器协作所给出的解决方案,自动地为多个容器设置好共享名称空间其实就是Docker Compose提供的核心能力。这种针对具体应用需求来共享名称空间的方案,的确可以工作,却并不够优雅,也谈不上有什么扩展性。容器的本质是对 cgroups 和 namespaces 所提供的隔离能力的一种封装,在 Docker 提倡的单进程封装的理念影响下,容器蕴含的隔离性也多了仅针对于单个进程的额外局限,然而 Linux 的 cgroups 和 namespaces 原本都是针对进程组而不仅仅是单个进程来设计的,同一个进程组中的多个进程天然就可以共享着相同的访问权限与资源配额。如果现在我们把容器与进程在概念上对应起来,那容器编排的第一个扩展点,就是要找到容器领域中与“进程组”相对应的概念,这是实现容器从隔离到协作的第一步,在 Kubernetes 的设计里,这个对应物叫作 Pod。
额外知识:Pod 名字的由来与含义
Pod 的概念在容器正式出现之前的 Borg 系统中就已经存在,从 Google 的发表的《Large-Scale Cluster Management at Google with Borg》可以看出,Kubernetes 时代的 Pod 整合了 Borg 时代的“Prod”(Production Task 的缩写)与“Non-Prod”的职能。由于 Pod 一直没有权威的中文翻译,笔者在后续文章中会尽量用英文指代,偶尔需要中文的场合就使用 Borg 中 Prod 的译法,即“生产任务”来指代。
有了“容器组”的概念,场景二的问题便只需要将多个容器放到同一个 Pod 中即可解决。扮演容器组的角色,满足容器共享名称空间的需求,是 Pod 的两大最基本职责之一,同处于一个 Pod 内的多个容器,相互之间以超亲密的方式协作。请注意,“超亲密”在这里并非某种带强烈感情色彩的形容词,而是有一种有具体定义的协作程度。对于普通非亲密的容器,它们一般以网络交互方式(其他譬如共享分布式存储来交换信息也算跨网络)协作;对亲密协作的容器,是指它们被调度到同一个集群节点上,可以通过共享本地磁盘等方式协作;而超亲密的协作是特指多个容器位于同一个 Pod 这种特殊关系,它们将默认共享:
- UTS 名称空间:所有容器都有相同的主机名和域名。
- 网络名称空间:所有容器都共享一样的网卡、网络栈、IP 地址,等等。因此,同一个 Pod 中不同容器占用的端口不能冲突。
- IPC 名称空间:所有容器都可以通过信号量或者 POSIX 共享内存等方式通信。
- 时间名称空间:所有容器都共享相同的系统时间。
同一个 Pod 的容器,只有 PID 名称空间和文件名称空间默认是隔离的。PID 的隔离令每个容器都有独立的进程 ID 编号,它们封装的应用进程就是 PID 为 1 的进程,可以通过 Pod 元数据定义中的spec.shareProcessNamespace来改变这点。一旦要求共享 PID 名称空间,容器封装的应用进程就不再具有 PID 为 1 的特征了,这有可能导致部分依赖该特征的应用出现异常。在文件名称空间方面,容器要求文件名称空间的隔离是很理所当然的需求,因为容器需要相互独立的文件系统以避免冲突。但容器间可以共享存储卷,这是通过 Kubernetes 的 Volume 来实现的。
额外知识:Kubernetes 中 Pod 名称空间共享的实现细节
Pod 内部多个容器共享 UTS、IPC、网络等名称空间是通过一个名为 Infra Container 的容器来实现的,这个容器是整个 Pod 中第一个启动的容器,只有几百 KB 大小(代码只有很短的几十行,见这里),Pod 中的其他容器都会以 Infra Container 作为父容器,UTS、IPC、网络等名称空间实质上都是来自 Infra Container 容器。
如果容器设置为共享 PID 名称空间的话,Infra Container 中的进程将作为 PID 1 进程,其他容器的进程将以它的子进程的方式存在,此时将由 Infra Container 来负责进程管理(譬如清理僵尸进程)、感知状态和传递状态。
由于 Infra Container 的代码除了注册 SIGINT、SIGTERM、SIGCHLD 等信号的处理器外,就只是一个以 pause()方法为循环体的无限循环,永远处于 Pause 状态,所以也常被称为“Pause Container”。
Pod 的另外一个基本职责是实现原子性调度,如果容器编排不跨越集群节点,是否具有原子性都无关紧要。但是在集群环境中,容器可能跨机器调度时,这个特性就变得非常重要。如果以容器为单位来调度的话,不同容器就有可能被分配到不同机器上。两台机器之间本来就是物理隔离,依靠网络连接的,这时候谈什么名称空间共享、cgroups配额共享都失去了意义,我们由此从场景二又演化出以下场景三。
场景三:假设你现在有 Filebeat、Nginx 两个 Docker 镜像,在一个具有多个节点的集群环境下,要求每次调度都必须让 Filebeat 和 Nginx 容器运行于同一个节点上。
两个关联的协作任务必须一起调度的需求在容器出现之前就存在已久,譬如在传统的多线程(或多进程)并发调度)中,如果两个线程(或进程)的工作是强依赖的,单独给谁分配处理时间、而另一个被挂起都会导致程序无法工作,如此就有了协同调度(Coscheduling)的概念,以保证一组紧密联系的任务能够被同时分配资源。如果我们在容器编排中仍然坚持将容器视为调度的最小粒度,那对容器运行所需资源的需求声明就只能设定在容器上,这样集群每个节点剩余资源越紧张,单个节点无法容纳全部协同容器的概率就越大,协同的容器被分配到不同节点的可能性就越高。
协同调度是十分麻烦的,实现起来要么很低效,譬如 Apache Mesos 的 Resource Hoarding 调度策略,就要等所有需要调度的任务都完备后才会开始分配资源;要么就会实现得很复杂,譬如 Google 就曾针对 Borg 的下一代 Omega 系统发表过论文《Omega: Flexible, Scalable Schedulers for Large Compute Clusters》介绍它如何使用通过乐观并发(Optimistic Concurrency)、冲突回滚的方式做到高效率,也同样高度复杂的协同调度。但是如果将运行资源的需求声明定义在 Pod 上,直接以 Pod 为最小的原子单位来实现调度的话,由于多个 Pod 之间必定不存在超亲密的协同关系,只会通过网络非亲密地协作,那就根本没有协同的说法,自然也不需要考虑复杂的调度了,关于 Kubernetes 的具体调度实现,笔者会在“资源与调度”中展开讲解。
Pod 是隔离与调度的基本单位,也是我们接触的第一种 Kubernetes 资源。Kubernetes 将一切皆视为资源,不同资源之间依靠层级关系相互组合协作,这个思想是贯穿 Kubernetes 整个系统的两大核心设计理念之一,不仅在容器、Pod、主机、集群等计算资源上是这样,在工作负载、持久存储、网络策略、身份权限等其他领域中也都有着一致的体现。
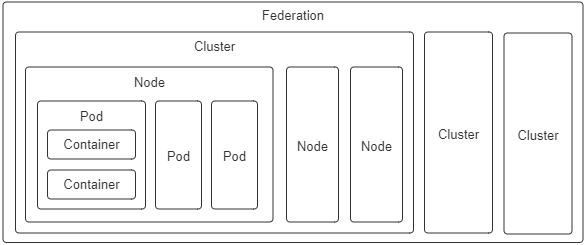
图 11-4 Kubernetes 的计算资源
由于 Pod 是 Kubernetes 中最重要的资源,又是资源模型中一种仅在逻辑上存在、没有物理对应的概念(因为对应的“进程组”也只是个逻辑概念),是其他编排系统没有的概念,所以笔者专门花费了一些篇幅去介绍它的设计意图,而不是像帮助手册那样直接给出它的作用和特性。对于 Kubernetes 中的其他计算资源,像 Node、Cluster 等都有切实的物理对应物,很容易就能形成共同的认知,笔者也就不必逐一介绍了,仅将它们的设计意图列举如下:
- 容器(Container):延续了自 Docker 以来一个容器封装一个应用进程的理念,是镜像管理的最小单位。
- 生产任务(Pod):补充了容器化后缺失的与进程组对应的“容器组”的概念,Pod 中容器共享 UTS、IPC、网络等名称空间,是资源调度的最小单位。
- 节点(Node):对应于集群中的单台机器,这里的机器即可以是生产环境中的物理机,也可以是云计算环境中的虚拟节点,节点是处理器和内存等资源的资源池,是硬件单元的最小单位。
- 集群(Cluster):对应于整个集群,Kubernetes 提倡理念是面向集群来管理应用。当你要部署应用的时候,只需要通过声明式 API 将你的意图写成一份元数据(Manifests),将它提交给集群即可,而无需关心它具体分配到哪个节点(尽管通过标签选择器完全可以控制它分配到哪个节点,但一般不需要这样做)、如何实现 Pod 间通信、如何保证韧性与弹性,等等,所以集群是处理元数据的最小单位。
- 集群联邦(Federation):对应于多个集群,通过联邦可以统一管理多个 Kubernetes 集群,联邦的一种常见应用是支持跨可用区域多活、跨地域容灾的需求。
韧性与弹性
笔者曾看过一部叫作《Bubble Boy》的电影,讲述了一个体内没有任何免疫系统的小男孩,终日只能生活在无菌的圆形气球里,对常人来说不值一提的细菌,都能够直接威胁到他的性命。小男孩尽管能够降生于世间,但并不能真正与世界交流,这种生命是极度脆弱的。
真实世界的软件系统与电影世界中的小男孩亦具有可比性。让容器得以相互连通,相互协作仅仅是以容器构建系统的第一步,我们不仅希望得到一个能够运行起来的系统,而且还希望得到一个能够健壮运行的系统、能够抵御意外与风险的系统。在 Kubernetes 的支持下,你确实可以直接创建 Pod 将应用运行起来,但这样的应用就如同电影中只能存活在气球中的小男孩一般脆弱,无论是软件缺陷、意外操作或者硬件故障,都可能导致在复杂协作的过程中某个容器出现异常,进而出现系统性的崩溃。为此,架构师专门设计了服务容错的策略和模式,Kubernetes 作为云原生时代的基础设施,也尽力帮助程序员以最小的代价来实现容错,为系统健壮运行提供底层支持。
如何实现具有韧性与弹性的系统是展示 Kubernetes 控制器设计模式的最好示例,控制器模式是继资源模型之后,本节介绍的另一个 Kubernetes 核心设计理念。下面,我们就从如何解决以下场景四的问题开始。
场景四:假设有一个由数十个 Node、数百个 Pod、近千个 Container 所组成的分布式系统,要避免系统因为外部流量压力、代码缺陷、软件更新、硬件升级、资源分配等各种原因而出现中断,作为管理员,你希望编排系统能为你提供何种支持?
作为用户,当然最希望容器编排系统能自动把所有意外因素都消灭掉,让任何每一个服务都永远健康,永不出错。但永不出错的服务是不切实际的,只有凑齐七颗龙珠才有望办到。那就只能退而求其次,让编排系统在这些服务出现问题,运行状态不正确的时候,能自动将它们调整成正确的状态。这种需求听起来也是贪心的,却已经具备足够的可行性,应对的解决办法在工业控制系统里已经有非常成熟的应用,叫作控制回路(Control Loop)。
Kubernetes 官方文档是以房间中空调自动调节温度为例子介绍了控制回路的一般工作过程的:当你设置好了温度,就是告诉空调你对温度的“期望状态”(Desired State),而传感器测量出的房间实际温度是“当前状态”(Current State)。根据当前状态与期望状态的差距,控制器对空调制冷的开关进行调节控制,就能让其当前状态逐渐接近期望状态。
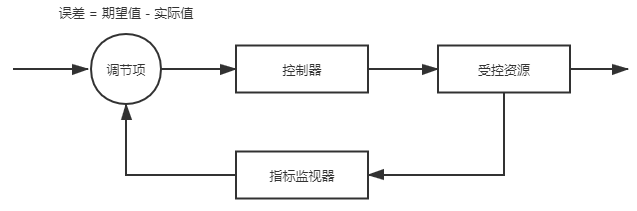
图 11-5 控制回路
将这种控制回路的思想迁移应用到容器编排上,自然会为 Kubernetes 中的资源附加上了期望状态与实际状态两项属性。不论是已经出现在上节的资源模型中,用于抽象容器运行环境的计算资源,还是没有登场的另一部分对应于安全、服务、令牌、网络等功能的资源,用户要想使用这些资源来实现某种需求,并不提倡像平常编程那样去调用某个或某一组方法来达成目的,而是通过描述清楚这些资源的期望状态,由 Kubernetes 中对应监视这些资源的控制器来驱动资源的实际状态逐渐向期望状态靠拢,以此来达成目的。这种交互风格被称为是 Kubernetes 的声明式 API,如果你已有过实际操作 Kubernetes 的经验,那你日常在元数据文件中的spec字段所描述的便是资源的期望状态。
额外知识:Kubernates 的资源对象与控制器
目前,Kubernetes 已内置支持相当多的资源对象,并且还可以使用CRD(Custom Resource Definition)来自定义扩充,你可以使用
kubectl api-resources来查看它们。笔者根据用途分类列举了以下常见的资源:
- 用于描述如何创建、销毁、更新、扩缩 Pod,包括:Autoscaling(HPA)、CronJob、DaemonSet、Deployment、Job、Pod、ReplicaSet、StatefulSet
- 用于配置信息的设置与更新,包括:ConfigMap、Secret
- 用于持久性地存储文件或者 Pod 之间的文件共享,包括:Volume、LocalVolume、PersistentVolume、PersistentVolumeClaim、StorageClass
- 用于维护网络通信和服务访问的安全,包括:SecurityContext、ServiceAccount、Endpoint、NetworkPolicy
- 用于定义服务与访问,包括:Ingress、Service、EndpointSlice
用于划分虚拟集群、节点和资源配额,包括:Namespace、Node、ResourceQuota
这些资源在控制器管理框架中一般都会有相应的控制器来管理,笔者列举常见的控制器,按照它们的启动情况分类如下:
必须启用的控制器:EndpointController、ReplicationController、PodGCController、ResourceQuotaController、NamespaceController、ServiceAccountController、GarbageCollectorController、DaemonSetController、JobController、DeploymentController、ReplicaSetController、HPAController、DisruptionController、StatefulSetController、CronJobController、CSRSigningController、CSRApprovingController、TTLController
- 默认启用的可选控制器,可通过选项禁止:TokenController、NodeController、ServiceController、RouteController、PVBinderController、AttachDetachController
- 默认禁止的可选控制器,可通过选项启用:BootstrapSignerController、TokenCleanerController
与资源相对应,只要是实际状态有可能发生变化的资源对象,通常都会由对应的控制器进行追踪,每个控制器至少会追踪一种类型的资源。为了管理众多资源控制器,Kubernetes 设计了统一的控制器管理框架(kube-controller-manager)来维护这些控制器的正常运作,以及统一的指标监视器(kube-apiserver)来为控制器工作时提供其追踪资源的度量数据。
由于毕竟不是在写 Kubernetes 的操作手册,笔者只能针对两三种资源和控制器为代表来举例说明,而无法将每个控制器都详细展开讲解。这里只要将场景四进一步具体化,转换成下面的场景五,便可以得到一个很好的例子,以部署控制器(Deployment Controller)、副本集控制器(ReplicaSet Controller)和自动扩缩控制器(HPA Controller)为例来介绍 Kubernetes 控制器模式的工作原理。
场景五:通过服务编排,对任何分布式系统自动实现以下三种通用的能力:
- Pod 出现故障时,能够自动恢复,不中断服务;
- Pod 更新程序时,能够滚动更新,不中断服务;
- Pod 遇到压力时,能够水平扩展,不中断服务;
前文曾提到虽然 Pod 本身也是资源,完全可以直接创建,但由 Pod 直接构成的系统是十分脆弱的,犹如气球中的小男孩,生产中并不提倡。正确的做法是通过副本集(ReplicaSet)来创建 Pod。ReplicaSet 也是一种资源,是属于工作负荷一类的资源,它代表一个或多个 Pod 副本的集合,你可以在 ReplicaSet 资源的元数据中描述你期望 Pod 副本的数量(即spec.replicas的值)。当 ReplicaSet 成功创建之后,副本集控制器就会持续跟踪该资源,如果一旦有 Pod 发生崩溃退出,或者状态异常(默认是靠进程返回值,你还可以在 Pod 中设置探针,以自定义的方式告诉 Kubernetes 出现何种情况 Pod 才算状态异常),ReplicaSet 都会自动创建新的 Pod 来替代异常的 Pod;如果异常多出现了额外数量的 Pod,也会被 ReplicaSet 自动回收掉,总之就是确保任何时候集群中这个 Pod 副本的数量都向期望状态靠拢。
ReplicaSet 本身就能满足场景五中的第一项能力,可以保证 Pod 出现故障时自动恢复,但是在升级程序版本时,ReplicaSet 不得不主动中断旧 Pod 的运行,重新创建新版的 Pod,这会造成服务中断。对于那些不允许中断的业务,以前的 Kubernetes 曾经提供过kubectl rolling-update命令来辅助实现滚动更新。
所谓滚动更新(Rolling Updates)是指先停止少量旧副本,维持大量旧副本继续提供服务,当停止的旧副本更新成功,新副本可以提供服务以后,再重复以上操作,直至所有的副本都更新成功。将这个过程放到 ReplicaSet 上,就是先创建新版本的 ReplicaSet,然后一边让新 ReplicaSet 逐步创建新版 Pod 的副本,一边让旧的 ReplicaSet 逐渐减少旧版 Pod 的副本。
之所以kubectl rolling-update命令会被淘汰,是因为这样的命令式交互完全不符合 Kubernetes 的设计理念(这是台面上的说法,笔者觉得淘汰的根本原因主要是因为它不够好用),如果你希望改变某个资源的某种状态,应该将期望状态告诉 Kubernetes,而不是去教 Kubernetes 具体该如何操作。因此,新的部署资源(Deployment)与部署控制器被设计出来,可以由 Deployment 来创建 ReplicaSet,再由 ReplicaSet 来创建 Pod,当你更新 Deployment 中的信息(譬如更新了镜像的版本)以后,部署控制器就会跟踪到你新的期望状态,自动地创建新 ReplicaSet,并逐渐缩减旧的 ReplicaSet 的副本数,直至升级完成后彻底删除掉旧 ReplicaSet,如图 11-6 所示。
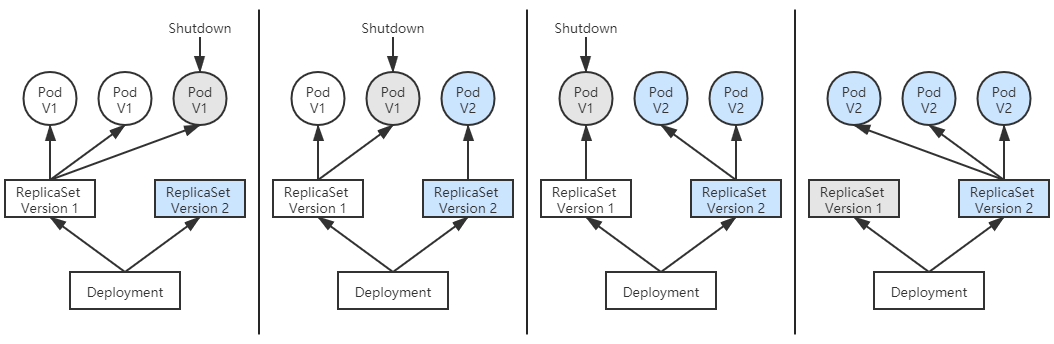
图 11-6 Deployment 滚动更新过程
对于场景五的最后一种情况,遇到流量压力时,管理员完全可以手动修改 Deployment 中的副本数量,或者通过kubectl scale命令指定副本数量,促使 Kubernetes 部署更多的 Pod 副本来应对压力,然而这种扩容方式不仅需要人工参与,且只靠人类经验来判断需要扩容的副本数量,不容易做到精确与及时。为此 Kubernetes 又提供了 Autoscaling 资源和自动扩缩控制器,能够自动根据度量指标,如处理器、内存占用率、用户自定义的度量值等,来设置 Deployment(或者 ReplicaSet)的期望状态,实现当度量指标出现变化时,系统自动按照“Autoscaling→Deployment→ReplicaSet→Pod”这样的顺序层层变更,最终实现根据度量指标自动扩容缩容。
故障恢复、滚动更新、自动扩缩这些特性,在云原生中时代里常被概括成服务的弹性(Elasticity)与韧性(Resilience),ReplicaSet、Deployment、Autoscaling 的用法,也属于是所有 Kubernetes 教材资料都会讲到的“基础必修课”。如果你准备学习 Kubernetes 或者其他云原生相关技术,笔者建议最好不要死记硬背地学习每个资源的元数据文件该如何编写、有哪些指令、有哪些功能,更好的方式是站在解决问题的角度去理解为什么 Kubernetes 要设计这些资源和控制器,理解为什么这些资源和控制器会被设计成现在这种样子。
如果你觉得已经理解了前面的几种资源和控制器的例子,那不妨思考一下以下几个问题:假设我想限制某个 Pod 持有的最大存储卷数量,应该会如何设计?假设集群中某个 Node 发生硬件故障,Kubernetes 要让调度任务避开这个 Node,应该如何设计?假设一旦这个 Node 重新恢复,Kubernetes 要能尽快利用上面的资源,又该如何去设计?只要你真正接受了资源与控制器是贯穿整个 Kubernetes 的两大设计理念,即便不去查文档手册,也应该能推想出个大概轮廓,以此为基础当你再去看手册或者源码时,想必就能够事半功倍
以应用为中心的封装
看完容器技术发展的历程,不知你会不会感到有种“套娃式”的迷惑感?容器的崛起缘于 chroot、namespaces、cgroups 等内核提供的隔离能力,系统级虚拟化技术使得同一台机器上互不干扰地运行多个服务成为可能;为了降低用户使用内核隔离能力的门槛,随后出现了 LXC,它是 namespaces、cgroups 特性的上层封装,使得“容器”一词真正走出实验室,走入工业界实际应用;为了实现跨机器的软件绿色部署,出现了 Docker,它(最初)是 LXC 的上层封装,彻底改变了软件打包分发的方式,迅速被大量企业广泛采用;为了满足大型系统对服务集群化的需要,出现了 Kubernetes,它(最初)是 Docker 的上层封装,让以多个容器共同协作构建出健壮的分布式系统,成为今天云原生时代的技术基础设施。
那 Kubernetes 会是容器化崛起之路的终点线吗?它达到了人们对云原生时代技术基础设施的期望了吗?从能力角度讲,是可以说是的,Kubernetes 被誉为云原生时代的操作系统,自诞生之日起就因其出色的管理能力、扩展性与以声明代替命令的交互理念收获了无数喝彩声;但是,从易用角度讲,坦白说差距还非常大,云原生基础设施的其中一个重要目标是接管掉业务系统复杂的非功能特性,让业务研发与运维工作变得足够简单,不受分布式的牵绊,然而 Kubernetes 被诟病得最多的就是复杂,自诞生之日起就以陡峭的学习曲线而闻名。
举个具体例子,用 Kubernetes 部署一套Spring Cloud 版的 Fenix’s Bookstore,你需要分别部署一个到多个的配置中心、注册中心、服务网关、安全认证、用户服务、商品服务、交易服务,对每个微服务都配置好相应的 Kubernetes 工作负载与服务访问,为每一个微服务的 Deployment、ConfigMap、StatefulSet、HPA、Service、ServiceAccount、Ingress 等资源都编写好元数据配置。这个过程最难的地方不仅在于繁琐,还在于要写出合适的元数据描述文件,既需要懂的开发(网关中服务调用关系、使用容器的镜像版本、运行依赖的环境变量这些参数等等,只有开发最清楚),又需要懂运维(要部署多少个服务,配置何种扩容缩容策略、数据库的密钥文件地址等等,只有运维最清楚),有时候还需要懂平台(需要什么的调度策略,如何管理集群资源,通常只有平台组、中间件组或者核心系统组的同学才会关心),一般企业根本找不到合适的角色来为它管理、部署和维护应用。
这个事儿 Kubernetes 心里其实也挺委屈,因为以上复杂性不能说是 Kubernetes 带来的,而是分布式架构本身的原罪。对于大规模的分布式集群,无论是最终用户部署应用,还是软件公司管理应用都存在诸多痛点。这些困难的实质源于 Docker 容器镜像封装了单个服务,Kubernetes 通过资源封装了服务集群,却没有一个载体真正封装整个应用,将原本属于应用内部的技术细节圈禁起来,不要暴露给最终用户、系统管理员和平台维护者,让使用者去埋单;应用难以管理矛盾在于封装应用的方法没能将开发、运维、平台等各种角色的关注点恰当地分离。
既然微服务时代,应用的形式已经不再限于单个进程,那也该到了重新定义“以应用为中心的封装”这句话的时候了。至于具体怎样的封装才算是正确,今天还未有特别权威的结论,不过经过人们的尝试探索,已经窥见未来容器应用的一些雏形,笔者将近几年来研究的几种主流思路列出供你参考。
Kustomize
最初,由 Kubernetes 官方给出“如何封装应用”的解决方案是“用配置文件来配置配置文件”,这不是绕口令,你可以理解为一种针对 YAML 的模版引擎的变体。Kubernetes 官方认为应用就是一组具有相同目标的 Kubernetes 资源的集合,如果逐一管理、部署每项资源元数据过于繁琐的话,那就提供一种便捷的方式,把应用中不变的信息与易变的信息分离开来解决管理问题,把应用所有涉及的资源自动生成一个多合一(All-in-One)的整合包来解决部署问题。
完成这项工作的工具叫作Kustomize,它原本只是一个独立的小程序,从 Kubernetes 1.14 起,被吸纳入kubectl命令之中,成为随着 Kubernetes 提供的内置功能。Kustomize 使用Kustomization 文件来组织与应用相关的所有资源,Kustomization 本身也是一个以 YAML 格式编写的配置文件,里面定义了构成应用的全部资源,以及资源中需根据情况被覆盖的变量值。
Kustomize 的主要价值是根据环境来生成不同的部署配置。只要建立多个 Kustomization 文件,开发人员就能以基于基准进行派生(Base and Overlay)的方式,对不同的模式(譬如生产模式、调试模式)、不同的项目(同一个产品对不同客户的客制化)定制出不同的资源整合包。在配置文件里,无论是开发关心的信息,还是运维关心的信息,只要是在元数据中有描述的内容,最初都是由开发人员来编写的,然后在编译期间由负责 CI/CD 的产品人员针对项目进行定制,最后在部署期间由运维人员通过 kubectl 的补丁(Patch)机制更改其中需要运维去关注的属性,譬如构造一个补丁来增加 Deployment 的副本个数,构造另外一个补丁来设置 Pod 的内存限制,等等。
k8s
├── base
│ ├── deployment.yaml
│ ├── kustomization.yaml
│ └── service.yaml
└── overlays
└── prod
│ ├── load-loadbalancer-service.yaml
│ └── kustomization.yaml
└── debug
└── kustomization.yamlKustomize 使用 Base、Overlay 和 Patch 生成最终配置文件的思路与 Docker 中分层镜像的思路有些相似,既规避了以“字符替换”对资源元数据文件的入侵,也不需要用户学习额外的 DSL 语法(譬如 Lua)。从效果来看,使用由 Kustomize 编译生成的 All-in-One 整合包来部署应用是相当方便的,只要一行命令就能够把应用涉及的所有服务一次安装好,本文档附带的Kubernetes 版本和Istio 版本的 Fenix’s Booktstore 都使用了这种方式来发布应用的,你不妨实际体验一下。
但是毕竟 Kustomize 只是一个“小工具”性质的辅助功能,对于开发人员,Kustomize 只能简化产品针对不同情况的重复配置,其实并没有真正解决应用管理复杂的问题,要做的事、要写的配置,最终都没有减少,只是不用反复去写罢了;对于运维人员,应用维护不仅仅只是部署那一下,应用的整个生命周期,除了安装外还有更新、回滚、卸载、多版本、多实例、依赖项维护等诸多问题都很麻烦。这些问题需要更加强大的管理工具去解决,譬如下一节的主角 Helm。不过 Kustomize 能够以极小的成本,在一定程度上分离了开发和运维的工作,无需像 Helm 那样需要一套独立的体系来管理应用,这种轻量便捷,本身也是一种可贵的价值。
Helm 与 Chart
另一种更具系统性的管理和封装应用的解决方案参考了各大 Linux 发行版管理应用的思路,代表为Deis 公司开发的Helm和它的应用格式 Chart。Helm 一开始的目标就很明确:如果说 Kubernetes 是云原生操作系统的话,那 Helm 就要成为这个操作系统上面的应用商店与包管理工具。
Linux 下的包管理工具和封装格式,如 Debian 系的 apt-get 命令与 dpkg 格式、RHEL 系的 yum 命令与 rpm 格式相信大家肯定不陌生。有了包管理工具,你只要知道应用的名称,就可以很方便地从应用仓库中下载、安装、升级、部署、卸载、回滚程序,而且包管理工具自己掌握着应用的依赖信息和版本变更情况,具备完整的自管理能力,每个应用需要依赖哪些前置的第三方库,在安装的时候都会一并处理好。
Helm 模拟的就是上面这种做法,它提出了与 Linux 包管理直接对应的 Chart 格式和 Repository 应用仓库,针对 Kubernetes 中特有的一个应用经常要部署多个版本的特点,也提出了 Release 的专有概念。
Chart 用于封装 Kubernetes 应用涉及到的所有资源,通常以目录内的文件集合的形式存在。目录名称就是 Chart 的名称(没有版本信息),譬如官方仓库中 WordPress Chart 的目录结构是这样的:
WordPress
├── templates
│ ├── NOTES.txt
│ ├── deployment.yaml
│ ├── externaldb-secrets.yaml
│ └── 版面原因省略其他资源文件
│ └── ingress.yaml
└── Chart.yaml
└── requirements.yaml
└── values.yaml其中有几个固定的配置文件:Chart.yaml给出了应用自身的详细信息(名称、版本、许可证、自述、说明、图标,等等),requirements.yaml给出了应用的依赖关系,依赖项指向的是另一个应用的坐标(名称、版本、Repository 地址),values.yaml给出了所有可配置项目的预定义值。可配置项是指需要部署期间由运维人员调整的那些参数,它们以花括号包裹在templates目录下的资源文件中,部署应用时,Helm 会先将管理员设置的值覆盖到values.yaml的默认值上,然后以字符串替换的形式传递给templates目录的资源模版,最后生成要部署到 Kubernetes 的资源文件。由于 Chart 封装了足够丰富的信息,所以 Helm 除了支持命令行操作外,也能很容易地根据这些信息自动生成图形化的应用安装、参数设置界面。
Repository 仓库用于实现 Chart 的搜索与下载服务,Helm 社区维护了公开的 Stable 和 Incubator 的中央仓库(界面如下图所示),也支持其他人或组织搭建私有仓库和公共仓库,并能够通过 Hub 服务把不同个人或组织搭建的公共仓库聚合起来,形成更大型的分布式应用仓库,有利于 Chart 的查找与共享。
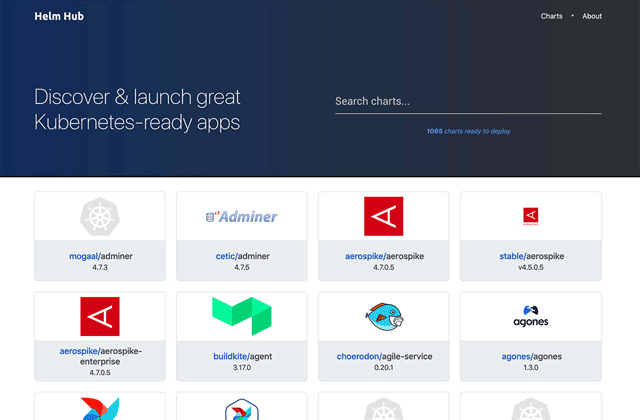
图 11-7 Helm Hub 商店(图片来自Helm 官网)
Helm 提供了应用全生命周期、版本、依赖项的管理能力,同时,Helm 还支持额外的扩展插件,能够加入 CI/CD 或者其他方面的辅助功能,这样的定位已经从单纯的工具升级到应用管理平台了。强大的功能让 Helm 受到了不少支持,有很多应用主动入驻到官方的仓库中。从 2018 年起,Helm 项目被托管到 CNCF,成为其中的一个孵化项目。
Helm 以模仿 Linux 包管理器的思路去管理 Kubernetes 应用,一定程度上是可行的,不过,Linux 与 Kubernetes 中部署应用还是存在一些差别,最重要的一点是在 Linux 中 99%的应用都只会安装一份,而 Kubernetes 里为了保证可用性,同一个应用部署多份副本才是常规操作。Helm 为了支持对同一个 Chart 包进行多次部署,每次安装应用都会产生一个版本(Release) ,版本相当于该 Chart 的安装实例。对于无状态的服务,Helm 靠着不同的版本就已经足够支持多个服务并行工作了,但对于有状态的服务来说,这些服务会与特定资源或者服务产生依赖关系,譬如要部署数据库,通常要依赖特定的存储来保存持久化数据,这样事情就变得复杂起来。Helm 无法很好地管理这种有状态的依赖关系,这一类问题就是 Operator 要解决的痛点了。
Operator 与 CRD
Operator不应当被称作是一种工具或者系统,它应该算是一种封装、部署和管理 Kubernetes 应用的方法,尤其是针对最复杂的有状态应用去封装运维能力的解决方案,最早由 CoreOS 公司(于 2018 年被 RedHat 收购)的华人程序员邓洪超所提出。
如果上一节“以容器构建系统”介绍 Kubernetes 资源与控制器模式时你没有开小差的话,那么 Operator 中最核心的理念你其实就已经理解得差不多了。简单地说,Operator 是通过 Kubernetes 1.7 开始支持的自定义资源(Custom Resource Definitions,CRD,此前曾经以 TPR,即 Third Party Resource 的形式提供过类似的能力),把应用封装为另一种更高层次的资源,再把 Kubernetes 的控制器模式从面向于内置资源,扩展到了面向所有自定义资源,以此来完成对复杂应用的管理。下面是笔者引用了一段 RedHat 官方对 Operator 设计理念的阐述:
Operator 设计理念
Operator 是使用自定义资源(CR,笔者注:CR 即 Custom Resource,是 CRD 的实例)管理应用及其组件的自定义 Kubernetes 控制器。高级配置和设置由用户在 CR 中提供。Kubernetes Operator 基于嵌入在 Operator 逻辑中的最佳实践将高级指令转换为低级操作。Kubernetes Operator 监视 CR 类型并采取特定于应用的操作,确保当前状态与该资源的理想状态相符。
—— 什么是 Kubernetes Operator,RedHat
以上这段文字不是笔者转述,而是直接由 RedHat 官方撰写和翻译成中文的,准确严谨但比较拗口,对于没接触过 Operator 的人并不友好,什么叫作“高级指令”?什么叫作“低级操作”?两者之间具体如何转换?为了能够理解这些问题,我们需要先弄清楚有状态和无状态应用的含义及影响,然后再来理解 Operator 所做的工作。
有状态应用(Stateful Application)与无状态应用(Stateless Application)说的是应用程序是否要自己持有其运行所需的数据,如果程序每次运行都跟首次运行一样,不会依赖之前任何操作所遗留下来的痕迹,那它就是无状态的;反之,如果程序推倒重来之后,用户能察觉到该应用已经发生变化,那它就是有状态的。无状态应用在分布式系统中具有非常巨大的价值,我们都知道分布式中的 CAP 不兼容原理,如果无状态,那就不必考虑状态一致性,没有了 C,那 A 和 P 便可以兼得,换而言之,只要资源足够,无状态应用天生就是高可用的。但不幸的是现在的分布式系统中多数关键的基础服务都是有状态的,如缓存、数据库、对象存储、消息队列,等等,只有 Web 服务器这类服务属于无状态。
站在 Kubernetes 的角度看,是否有状态的本质差异在于有状态应用会对某些外部资源有绑定性的直接依赖,譬如 Elasticsearch 建立实例时必须依赖特定的存储位置,重启后仍然指向同一个数据文件的实例才能被认为是相同的实例。另外,有状态应用的多个应用实例之间往往有着特定的拓扑关系与顺序关系,譬如 Etcd 的节点间选主和投票,节点们都需要得知彼此的存在。为了管理好那些与应用实例密切相关的状态信息,Kubernetes 从 1.9 版本开始正式发布了 StatefulSet 及对应的 StatefulSetController。与普通 ReplicaSet 中的 Pod 相比,由 StatefulSet 管理的 Pod 具备以下几项额外特性:
- Pod 会按顺序创建和按顺序销毁:StatefulSet 中的各个 Pod 会按顺序地创建出来,创建后续的 Pod 前,必须要保证前面的 Pod 已经转入就绪状态。删除 StatefulSet 中的 Pod 时会按照与创建顺序的逆序来执行。
- Pod 具有稳定的网络名称:Kubernetes 中的 Pod 都具有唯一的名称,在普通的副本集中这是靠随机字符产生的,而在 StatefulSet 中管理的 Pod,会以带有顺序的编号作为名称,且能够在重启后依然保持不变。。
- Pod 具有稳定的持久存储:StatefulSet 中的每个 Pod 都可以拥有自己独立的 PersistentVolumeClaim 资源。即使 Pod 被重新调度到其它节点上,它所拥有的持久磁盘也依然会被挂载到该 Pod,这点会在“容器持久化”中进一步介绍。
只是罗列出特性,应该很难快速理解 StatefulSet 的设计意图,笔者打个比方来帮助你理解:如果把 ReplicaSet 中的 Pod 比喻为养殖场中的“肉猪”,那 StatefulSet 就是被家庭当宠物圈养的“荷兰猪”,不同的肉猪在食用功能上并没有什么区别,但每只宠物猪都是独一无二的,有专属于自己的名字、习性与记忆,事实上,早期的 StatefulSet 就曾经有一段时间用过 PetSet 这个名字。
当 StatefulSet 出现以后,Kubernetes 就能满足 Pod 重新创建后仍然保留上一次运行状态的需求,不过有状态应用的维护并不仅限于此,譬如对于一套 Elasticsearch 集群来说,通过 StatefulSet 最多只能做到创建集群、删除集群、扩容缩容等最基本的操作,其他的运维操作,譬如备份和恢复数据、创建和删除索引、调整平衡策略等操作也十分常用,但是 StatefulSet 并不能为此提供任何帮助。
笔者再举个实际例子来说明 Operator 是如何解决那些 StatefulSet 覆盖不到的有状态服务管理需求的:假设要部署一套 Elasticsearch 集群,通常要在 StatefulSet 中定义相当多的细节,譬如服务的端口、Elasticsearch 的配置、更新策略、内存大小、虚拟机参数、环境变量、数据文件位置,等等,为了便于你对已经反复提及的 Kubernetes 的复杂有更加直观的体验,这里就奢侈一次,挥霍一次版面,将满足这个需求的 YAML 全文贴出如下:
apiVersion: v1
kind: Service
metadata:
name: elasticsearch-cluster
spec:
clusterIP: None
selector:
app: es-cluster
ports:
- name: transport
port: 9300
---
apiVersion: v1
kind: Service
metadata:
name: elasticsearch-loadbalancer
spec:
selector:
app: es-cluster
ports:
- name: http
port: 80
targetPort: 9200
type: LoadBalancer
---
apiVersion: v1
kind: ConfigMap
metadata:
name: es-config
data:
elasticsearch.yml: |
cluster.name: my-elastic-cluster
network.host: "0.0.0.0"
bootstrap.memory_lock: false
discovery.zen.ping.unicast.hosts: elasticsearch-cluster
discovery.zen.minimum_master_nodes: 1
xpack.security.enabled: false
xpack.monitoring.enabled: false
ES_JAVA_OPTS: -Xms512m -Xmx512m
---
apiVersion: apps/v1beta1
kind: StatefulSet
metadata:
name: esnode
spec:
serviceName: elasticsearch
replicas: 3
updateStrategy:
type: RollingUpdate
template:
metadata:
labels:
app: es-cluster
spec:
securityContext:
fsGroup: 1000
initContainers:
- name: init-sysctl
image: busybox
imagePullPolicy: IfNotPresent
securityContext:
privileged: true
command: ["sysctl", "-w", "vm.max_map_count=262144"]
containers:
- name: elasticsearch
resources:
requests:
memory: 1Gi
securityContext:
privileged: true
runAsUser: 1000
capabilities:
add:
- IPC_LOCK
- SYS_RESOURCE
image: docker.elastic.co/elasticsearch/elasticsearch:7.9.1
env:
- name: ES_JAVA_OPTS
valueFrom:
configMapKeyRef:
name: es-config
key: ES_JAVA_OPTS
readinessProbe:
httpGet:
scheme: HTTP
path: /_cluster/health?local=true
port: 9200
initialDelaySeconds: 5
ports:
- containerPort: 9200
name: es-http
- containerPort: 9300
name: es-transport
volumeMounts:
- name: es-data
mountPath: /usr/share/elasticsearch/data
- name: elasticsearch-config
mountPath: /usr/share/elasticsearch/config/elasticsearch.yml
subPath: elasticsearch.yml
volumes:
- name: elasticsearch-config
configMap:
name: es-config
items:
- key: elasticsearch.yml
path: elasticsearch.yml
volumeClaimTemplates:
- metadata:
name: es-data
spec:
accessModes: [ "ReadWriteOnce" ]
resources:
requests:
storage: 5Gi出现如此大量的细节配置,其根本原因在于 Kubernetes 完全不知道 Elasticsearch 是个什么东西,所有 Kubernetes 不知道的信息、不能启发式推断出来的信息,都必须由用户在资源的元数据定义中明确列出,必须一步一步手把手地“教会”Kubernetes 如何部署 Elasticsearch,这种形式就属于 RedHat 在 Operator 设计理念介绍中所说的“低级操作”。
如果我们使用Elastic.co 官方提供的 Operator,那情况就会简单得多了,Elasticsearch Operator 提供了一种kind: Elasticsearch的自定义资源,在它的帮助下,仅需十行代码,将用户的意图是“部署三个版本为 7.9.1 的 ES 集群节点”说清楚即可,便能实现与前面 StatefulSet 那一大堆配置相同乃至更强大的效果,如下面代码所示。
apiVersion: elasticsearch.k8s.elastic.co/v1
kind: Elasticsearch
metadata:
name: elasticsearch-cluster
spec:
version: 7.9.1
nodeSets:
- name: default
count: 3
config:
node.master: true
node.data: true
node.ingest: true
node.store.allow_mmap: false有了 Elasticsearch Operator 的自定义资源,相当于 Kubernetes 已经学会怎样操作了 Elasticsearch,知道所有它相关的参数含义与默认值,无需用户再手把手地教了,这种就是所谓的“高级指令”。
Operator 将简洁的高级指令转化为 Kubernetes 中具体操作的方法,与前面 Helm 或者 Kustomize 的思路并不相同。Helm 和 Kustomize 最终仍然是依靠 Kubernetes 的内置资源来跟 Kubernetes 打交道的,Operator 则是要求开发者自己实现一个专门针对该自定义资源的控制器,在控制器中维护自定义资源的期望状态。通过程序编码来扩展 Kubernetes,比只通过内置资源来与 Kubernetes 打交道要灵活得多,譬如当需要更新集群中某个 Pod 对象的时候,由 Operator 开发者自己编码实现的控制器完全可以在原地对 Pod 进行重启,而无需像 Deployment 那样必须先删除旧 Pod,然后再创建新 Pod。
使用 CRD 定义高层次资源、使用配套的控制器来维护期望状态,带来的好处不仅仅是“高级指令”的便捷,而是遵循 Kubernetes 一贯基于资源与控制器的设计原则的同时,又不必再受制于 Kubernetes 内置资源的表达能力。只要 Operator 的开发者愿意编写代码,前面曾经提到那些 StatfulSet 不能支持的能力,如备份恢复数据、创建删除索引、调整平衡策略等操作,都完全可以实现出来。
把运维的操作封装在程序代码上,表面看最大的受益者是运维人员,开发人员要为此付出更多劳动。然而 Operator 并没有受到开发人员的抵制,让它变得小众,反而由于代码相对于资源配置的表达能力提升,让开发与运维之间的协作成本降低而备受开发者的好评。Operator 变成了近两、三年容器封装应用的一股新潮流,现在很多复杂分布式系统都有了官方或者第三方提供的 Operator(这里收集了一部分)。RedHat 公司也持续在 Operator 上面大量投入,推出了简化开发人员编写 Operator 的Operator Framework/SDK。
目前看来,应对有状态应用的封装运维,Operator 也许是最有可行性的方案,但这依然不是一项轻松的工作。以Etcd 的 Operator为例,Etcd 本身不算什么特别复杂的应用,Operator 实现的功能看起来也相当基础,主要有创建集群、删除集群、扩容缩容、故障转移、滚动更新、备份恢复等功能,其代码就已经超过一万行了。现在开发 Operator 的确还是有着相对较高的门槛,通常由专业的平台开发者而非业务开发或者运维人员去完成,但是 Operator 符合技术潮流,顺应软件业界所提倡的 DevOps 一体化理念,等 Operator 的支持和生态进一步成熟之后,开发和运维都能从中受益,未来应该能成长为一种应用封装的主流形式。
开放应用模型
本节介绍的最后一种应用封装的方案,是阿里云和微软在 2019 年 10 月上海 QCon 大会上联合发布的开放应用模型(Open Application Model,OAM),它不仅是中国云计算企业参与制定乃至主导发起的国际技术规范,也是业界首个云原生应用标准定义与架构模型。
开放应用模型思想的核心是如何将开发人员、运维人员与平台人员关注点分离,开发人员关注业务逻辑的实现,运维人员关注程序平稳运行,平台人员关注基础设施的能力与稳定性,长期让几个角色厮混在同一个 All-in-One 资源文件里,并不能擦出什么火花,反而将配置工作弄得越来越复杂,将“YAML Engineer”弄成了容器界的嘲讽梗。
开放应用模型把云原生应用定义为“由一组相互关联但又离散独立的组件构成,这些组件实例化在合适的运行时上,由配置来控制行为并共同协作提供统一的功能”。没看明白定义并没有关系,为了便于跟稍后的概念对应,笔者首先把这句话拆解、翻译为你更加看不明白的另一种形式:
OAM 定义的应用
一个
Application由一组Components构成,每个Component的运行状态由Workload描述,每个Component可以施加Traits来获取额外的运维能力,同时我们可以使用Application Scopes将Components划分到一或者多个应用边界中,便于统一做配置、限制、管理。把Components、Traits和Scopes组合在一起实例化部署,形成具体的Application Configuration,以便解决应用的多实例部署与升级。
然后,笔者通过解析上述所列的核心概念来帮助你理解 OAM 对应用的定义。这段话里面每一个用英文标注出来的技术名词都是 OAM 在 Kubernetes 基础上扩展而来概念,每一个名词都有专门的自定义资源与之对应,换而言之,它们并非纯粹的抽象概念,而是可以被实际使用的自定义资源。这些概念的具体含义是:
服务组件(Components):由 Component 构成应用的思想自 SOA 以来就屡见不鲜,然而 OAM 的 Component 不仅仅是特指构成应用“整体”的一个“部分”,它还有一个重要职责是抽象那些应该由开发人员去关注的元素。譬如应用的名字、自述、容器镜像、运行所需的参数,等等。
工作负荷(Workload):Workload 决定了应用的运行模式,每个 Component 都要设定自己的 Workload 类型,OAM 按照“是否可访问、是否可复制、是否长期运行”预定义了六种 Workload 类型,如表 11-2 所示。如有必要还可以通过 CRD 与 Operator 去扩展。
表 11-2 OAM 的六种工作负荷
| 工作负荷 | 可访问 | 可复制 | 长期运行 |
| ———————— | :——: | :——: | :———: |
| Server | √ | √ | √ |
| Singleton Server | √ | × | √ |
| Worker | × | √ | √ |
| Singleton Worker | × | × | √ |
| Task | × | √ | × |
| Singleton Task | × | × | × |运维特征(Traits):开发活动有大量复用功能的技巧,但运维活动却很贫乏,平时能为运维写个 Shell 脚本或者简单工具已经算是个高级的运维人员了。OAM 的 Traits 就用于封装模块化后的运维能力,可以针对运维中的可重复操作预先设定好一些具体的 Traits,譬如日志收集 Trait、负载均衡 Trait、水平扩缩容 Trait,等等。 这些预定义的 Traits 定义里,会注明它们可以作用于哪种类型的工作负荷、包含能填哪些参数、哪些必填选填项、参数的作用描述是什么,等等。
应用边界(Application Scopes):多个 Component 共同组成一个 Scope,你可以根据 Component 的特性或者作用域来划分 Scope,譬如具有相同网络策略的 Component 放在同一个 Scope 中,具有相同健康度量策略的 Component 放到另一个 Scope 中。同时,一个 Component 也可能属于多个 Scope,譬如一个 Component 完全可能既需要配置网络策略,也需要配置健康度量策略。
应用配置(Application Configuration):将 Component(必须)、Trait(必须)、Scope(非必须)组合到一起进行实例化,就形成了一个完整的应用配置。
OAM 使用上述介绍的这些自定义资源将原先 All-in-One 的复杂配置做了一定层次的解耦,开发人员负责管理 Component;运维人员将 Component 组合并绑定 Trait 变成 Application Configuration;平台人员或基础设施提供方负责提供 OAM 的解释能力,将这些自定义资源映射到实际的基础设施。不同角色分工协作,整体简化了单个角色关注的内容,使得不同角色可以更聚焦更专业的做好本角色的工作,整个过程如图 11-8 所示。
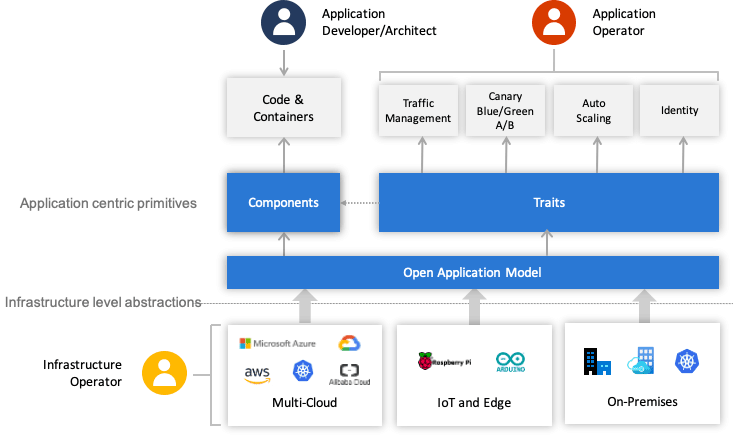
图 11-8 OAM 角色关系图(图片来自OAM 规范 GitHub)
OAM 未来能否成功,很大程度上取决于云计算厂商的支持力度,因为 OAM 的自定义资源一般是由云计算基础设施负责解释和驱动的,譬如阿里云的EDAS就已内置了 OAM 的支持。如果你希望能够应用于私有 Kubernetes 环境,目前 OAM 的主要参考实现是Rudr(已声明废弃)和Crossplane,Crossplane 是一个仅发起一年多的 CNCF 沙箱项目,主要参与者包括阿里云、微软、Google、RedHat 等工程师。Crossplane 提供了 OAM 中全部的自定义资源以及控制器,安装后便可用 OAM 定义的资源来描述应用。
后记:今天容器圈的发展是一日千里,各种新规范、新技术层出不穷,本节根据人气和代表性,列举了其中最出名的四种,其他笔者未提到的应用封装技术还有CNAB、Armada、Pulumi等等。这些封装技术会有一定的重叠之处,但并非都是重复的轮子,实际应用时往往会联合其中多个工具一起使用。应该如何封装应用才是最佳的实践,目前尚且没有定论,但是以应用为中心的理念却已经成为明确的共识。
容器间网络
本章我们将会讨论虚拟化网络方面的话题,如果不加任何限定,“虚拟化网络”是一项内容十分丰富,研究历史十分悠久的计算机技术,是计算机科学中一门独立的分支,完全不依附于虚拟化容器而存在。网络运营商常提及的“网络功能虚拟化”(Network Function Virtualization,NFV),网络设备商和网络管理软件提供商常提及的“软件定义网络”(Software Defined Networking,SDN)等都属于虚拟化网络的范畴。对于普通的软件开发者而言,要完全理解和掌握虚拟化网络,需要储备大量开发中不常用到的专业知识与消耗大量的时间成本,一般并无必要。
本节我们讨论的虚拟化网络是狭义的,它特指“基于 Linux 系统的网络虚拟化技术来实现的容器间网络通信”,更通俗一点说,就是只关注那些为了相互隔离的 Linux 网络名称空间可相互通信而设计出来的虚拟化网络设施,讨论这个问题所需的网络知识,基本还是在普通开发者应该具有的合理知识范畴之内。在这个语境中的“虚拟化网络”就是直接为容器服务的,说它是依附于容器而存在的亦无不可,因此为避免混淆,笔者在后文中会尽量回避“虚拟化网络”这个范畴过大的概念,后续的讨论将会以“Linux 网络虚拟化”和“容器网络与生态”为题来展开。
Linux 网络虚拟化
Linux 目前提供的八种名称空间里,网络名称空间无疑是隔离内容最多的一种,它为名称空间内的所有进程提供了全套的网络设施,包括独立的设备界面、路由表、ARP 表,IP 地址表、iptables/ebtables 规则、协议栈,等等。虚拟化容器是以 Linux 名称空间的隔离性为基础来实现的,那解决隔离的容器之间、容器与宿主机之间、乃至跨物理网络的不同容器间通信问题的责任,很自然也落在了 Linux 网络虚拟化技术的肩上。本节里,我们暂时放下容器编排、云原生、微服务等这些上层概念,走入 Linux 网络的底层世界,去学习一些与设备、协议、通信相关的基础网络知识。
本节的阅读对象设定为以实现业务功能为主、平常并不直接接触网络设备的普通开发人员,对于平台基础设施的开发者或者运维人员,可能会显得有点过于啰嗦或过于基础了,如果你已经提前掌握了这些知识,完全可以快速阅读,或者直接跳过部分内容。
网络通信模型
如果抛开虚拟化,只谈网络的话,那首先应该了解的知识笔者认为是 Linux 系统的网络通信模型,即信息是如何从程序中发出,通过网络传输,再被另一个程序接收到的。整体上看,Linux 系统的通信过程无论按理论上的 OSI 七层模型,还是以实际上的 TCP/IP 四层模型来解构,都明显地呈现出“逐层调用,逐层封装”的特点,这种逐层处理的方式与栈结构,譬如程序执行时的方法栈很类似,因此它通常被称为“Linux 网络协议栈”,简称“网络栈”,有时也称“协议栈”。图 12-1 体现了 Linux 网络通信过程与 OSI 或者 TCP/IP 模型的对应关系,也展示了网络栈中的数据流动的路径。
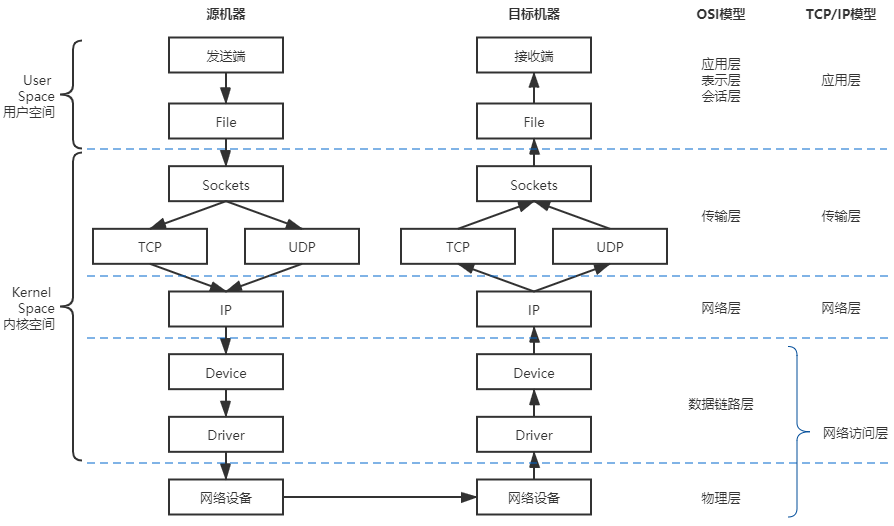
图 12-1 Linux 系统下的网络通信模型
图中传输模型的左侧,笔者特别标示出了网络栈在用户与内核空间的部分,可见几乎整个网络栈(应用层以下)都位于系统内核空间之中,之所以采用这种设计,主要是从数据安全隔离的角度出发来考虑的。由内核去处理网络报文的收发,无疑会有更高的执行开销,譬如数据在内核态和用户态之间来回拷贝的额外成本,因此会损失一些性能,但是能够保证应用程序无法窃听到或者去伪造另一个应用程序的通信内容。针对特别关注收发性能的应用场景,也有直接在用户空间中实现全套协议栈的旁路方案,譬如开源的Netmap以及 Intel 的DPDK,都能做到零拷贝收发网络数据包。
图中传输模型的箭头展示的是数据流动的方向,它体现了信息从程序中发出以后,到被另一个程序接收到之前,将经历如下几个阶段:
- Socket:应用层的程序是通过 Socket 编程接口来和内核空间的网络协议栈通信的。Linux Socket 是从 BSD Socket 发展而来的,现在 Socket 已经不局限于某个操作系统的专属功能,成为各大主流操作系统共同支持的通用网络编程接口,是网络应用程序实际上的交互基础。应用程序通过读写收、发缓冲区(Receive/Send Buffer)来与 Socket 进行交互,在 UNIX 和 Linux 系统中,出于“一切皆是文件”的设计哲学,对 Socket 操作被实现为对文件系统(socketfs)的读写访问操作,通过文件描述符(File Descriptor)来进行。
- TCP/UDP:传输层协议族里最重要的协议无疑是传输控制协议(Transmission Control Protocol,TCP)和用户数据报协议(User Datagram Protocol,UDP)两种,它们也是在 Linux 内核中被直接支持的协议。此外还有流控制传输协议(Stream Control Transmission Protocol,SCTP)、数据报拥塞控制协议(Datagram Congestion Control Protocol,DCCP)等等。
不同的协议处理流程大致是一样的,只是封装的报文以及头、尾部信息会有所不同,这里以 TCP 协议为例,内核发现 Socket 的发送缓冲区中有新的数据被拷贝进来后,会把数据封装为 TCP Segment 报文,常见网络协议的报文基本上都是由报文头(Header)和报文体(Body,也叫荷载“Payload”)两部分组成。系统内核将缓冲区中用户要发送出去的数据作为报文体,然后把传输层中的必要控制信息,譬如代表哪个程序发、由哪个程序收的源、目标端口号,用于保证可靠通信(重发与控制顺序)的序列号、用于校验信息是否在传输中出现损失的校验和(Check Sum)等信息封装入报文头中。 - IP:网络层协议最主要就是网际协议(Internet Protocol,IP),其他还有因特网组管理协议(Internet Group Management Protocol,IGMP)、大量的路由协议(EGP、NHRP、OSPF、IGRP、……)等等。
以 IP 协议为例,它会将来自上一层(本例中的 TCP 报文)的数据包作为报文体,再次加入自己的报文头,譬如指明数据应该发到哪里的路由地址、数据包的长度、协议的版本号,等等,封装成 IP 数据包后发往下一层。关于 TCP 和 IP 协议报文的内容,笔者曾在“负载均衡”中详细讲解过,有需要的读者可以参考。 - Device:网络设备(Device)是网络访问层中面向系统一侧的接口,这里所说的设备与物理硬件设备并不是同一个概念,Device 只是一种向操作系统端开放的接口,其背后既可能代表着真实的物理硬件,也可能是某段具有特定功能的程序代码,譬如即使不存在物理网卡,也依然可以存在回环设备(Loopback Device)。许多网络抓包工具,如tcpdump、Wirshark便是在此处工作的,前面介绍微服务流量控制时曾提到过的网络流量整形,通常也是在这里完成的。Device 主要的作用是抽象出统一的界面,让程序代码去选择或影响收发包出入口,譬如决定数据应该从哪块网卡设备发送出去;还有就是准备好网卡驱动工作所需的数据,譬如来自上一层的 IP 数据包、下一跳)(Next Hop)的 MAC 地址(这个地址是通过ARP Request得到的)等等。
- Driver:网卡驱动程序(Driver)是网络访问层中面向硬件一侧的接口,网卡驱动程序会通过DMA将主存中的待发送的数据包复制到驱动内部的缓冲区之中。数据被复制的同时,也会将上层提供的 IP 数据包、下一跳 MAC 地址这些信息,加上网卡的 MAC 地址、VLAN Tag 等信息一并封装成为以太帧(Ethernet Frame),并自动计算校验和。对于需要确认重发的信息,如果没有收到接收者的确认(ACK)响应,那重发的处理也是在这里自动完成的。
上面这些阶段是信息从程序中对外发出时经过协议栈的过程,接收过程则是从相反方向进行的逆操作。程序发送数据做的是层层封包,加入协议头,传给下一层;接受数据则是层层解包,提取协议体,传给上一层,你可以类比来理解数据包接收过程,笔者就不再专门列举一遍数据接收步骤了。
干预网络通信
网络协议栈的处理是一套相对固定和封闭的流程,整套处理过程中,除了在网络设备这层能看到一点点程序以设备的形式介入处理的空间外,其他过程似乎就没有什么可供程序插手的余地了。然而事实并非如此,从 Linux Kernel 2.4 版开始,内核开放了一套通用的、可供代码干预数据在协议栈中流转的过滤器框架。这套名为 Netfilter 的框架是 Linux 防火墙和网络的主要维护者 Rusty Russell 提出并主导设计的,它围绕网络层(IP 协议)的周围,埋下了五个钩子(Hooks),每当有数据包流到网络层,经过这些钩子时,就会自动触发由内核模块注册在这里的回调函数,程序代码就能够通过回调来干预 Linux 的网络通信。笔者先将这五个钩子的名字与含义列出:
- PREROUTING:来自设备的数据包进入协议栈后立即触发此钩子。PREROUTING 钩子在进入 IP 路由之前触发,这意味着只要接收到的数据包,无论是否真的发往本机,都会触发此钩子。一般用于目标网络地址转换(Destination NAT,DNAT)。
- INPUT:报文经过 IP 路由后,如果确定是发往本机的,将会触发此钩子,一般用于加工发往本地进程的数据包。
- FORWARD:报文经过 IP 路由后,如果确定不是发往本机的,将会触发此钩子,一般用于处理转发到其他机器的数据包。
- OUTPUT:从本机程序发出的数据包,在经过 IP 路由前,将会触发此钩子,一般用于加工本地进程的输出数据包。
- POSTROUTING:从本机网卡出去的数据包,无论是本机的程序所发出的,还是由本机转发给其他机器的,都会触发此钩子,一般用于源网络地址转换(Source NAT,SNAT)。
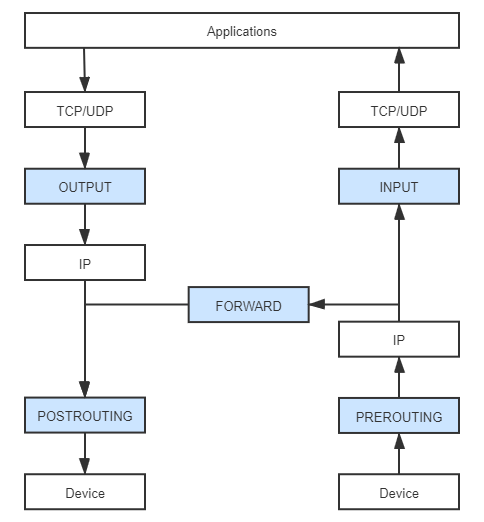
图 12-2 应用收、发数据包所经过的 Netfilter 钩子
Netfilter 允许在同一个钩子处注册多个回调函数,因此向钩子注册回调函数时必须提供明确的优先级,以便触发时能按照优先级从高到低进行激活。由于回调函数会存在多个,看起来就像挂在同一个钩子上的一串链条,因此钩子触发的回调函数集合就被称为“回调链”(Chained Callbacks),这个名字导致了后续基于 Netfilter 设计的 Xtables 系工具,如稍后介绍的 iptables 均有使用到“链”(Chain)的概念。虽然现在看来 Netfilter 只是一些简单的事件回调机制而已,然而这样一套简单的设计,却成为了整座 Linux 网络大厦的核心基石,Linux 系统提供的许多网络能力,如数据包过滤、封包处理(设置标志位、修改 TTL 等)、地址伪装、网络地址转换、透明代理、访问控制、基于协议类型的连接跟踪,带宽限速,等等,都是在 Netfilter 基础之上实现的。
以 Netfilter 为基础的应用有很多,其中使用最广泛的毫无疑问要数 Xtables 系列工具,譬如iptables、ebtables、arptables、ip6tables 等等。这里面至少 iptables 应该是用过 Linux 系统的开发人员都或多或少会使用过,它常被称为是 Linux 系统“自带的防火墙”,然而 iptables 实际能做的事情已远远超出防火墙的范畴,严谨地讲,比较贴切的定位应是能够代替 Netfilter 多数常规功能的 IP 包过滤工具。iptables 的设计意图是因为 Netfilter 的钩子回调虽然很强大,但毕竟要通过程序编码才能够使用,并不适合系统管理员用来日常运维,而它的价值便是以配置去实现原本用 Netfilter 编码才能做到的事情。iptables 先把用户常用的管理意图总结成具体的行为预先准备好,然后在满足条件时自动激活行为。以下列出了部分 iptables 预置的行为:
- DROP:直接将数据包丢弃。
- REJECT:给客户端返回 Connection Refused 或 Destination Unreachable 报文。
- QUEUE:将数据包放入用户空间的队列,供用户空间的程序处理。
- RETURN:跳出当前链,该链里后续的规则不再执行。
- ACCEPT:同意数据包通过,继续执行后续的规则。
- JUMP:跳转到其他用户自定义的链继续执行。
- REDIRECT:在本机做端口映射。
- MASQUERADE:地址伪装,自动用修改源或目标的 IP 地址来做 NAT
- LOG:在/var/log/messages 文件中记录日志信息。
- ……
这些行为本来能够被挂载到 Netfilter 钩子的回调链上,但 iptables 又进行了一层额外抽象,不是把行为与链直接挂钩,而是根据这些底层操作根据其目的,先总结为更高层次的规则。举个例子,假设你挂载规则目的是为了实现网络地址转换(NAT),那就应该对符合某种特征的流量(譬如来源于某个网段、从某张网卡发送出去)、在某个钩子上(譬如做 SNAT 通常在 POSTROUTING,做 DNAT 通常在 PREROUTING)进行 MASQUERADE 行为,这样具有相同目的的规则,就应该放到一起才便于管理,由此便形成“规则表”的概念。iptables 内置了五张不可扩展的规则表(其中 security 表并不常用,很多资料只计算了前四张表),如下所列:
- raw 表:用于去除数据包上的连接追踪机制(Connection Tracking)。
- mangle 表:用于修改数据包的报文头信息,如服务类型(Type Of Service,ToS)、生存周期(Time to Live,TTL)以及为数据包设置 Mark 标记,典型的应用是链路的服务质量管理(Quality Of Service,QoS)。
- nat 表:用于修改数据包的源或者目的地址等信息,典型的应用是网络地址转换(Network Address Translation)。
- filter 表:用于对数据包进行过滤,控制到达某条链上的数据包是继续放行、直接丢弃或拒绝(ACCEPT、DROP、REJECT),典型的应用是防火墙。
- security 表:用于在数据包上应用SELinux,这张表并不常用。
以上五张规则表是具有优先级的:raw→mangle→nat→filter→security,也即是上面列举它们的顺序。在 iptables 中新增规则时,需要按照规则的意图指定要存入到哪张表中,如果没有指定,默认将会存入 filter 表。此外,每张表能够使用到的链也有所不同,具体表与链的对应关系如表 12-1 所示。
表 12-1 表与链的对应关系
| PREROUTING | POSTROUTING | FORWARD | INPUT | OUTPUT | |
|---|---|---|---|---|---|
| raw | √ | × | × | × | √ |
| mangle | √ | √ | √ | √ | √ |
| nat(Source) | × | √ | × | √ | × |
| nat(Destination) | √ | × | × | × | √ |
| filter | × | × | √ | √ | √ |
| security | × | × | √ | √ | √ |
从名字上就能看出预置的五条链直接源自于 Netfilter 的钩子,它们与五张规则表的对应关系是固定的,用户不能增加自定义的表,或者修改已有表与链的关系,但可以增加自定义的链,新增的自定义链与 Netfilter 的钩子没有天然的对应关系,换而言之就是不会被自动触发,只有显式使用 JUMP 行为,从默认的五条链中跳转过去才能被执行。
iptables 不仅仅是 Linux 系统自带的一个网络工具,它在容器间通信中扮演相当重要的角色,譬如 Kubernetes 用来管理 Sevice 的 Endpoints 的核心组件 kube-proxy,就依赖 iptables 来完成 ClusterIP 到 Pod 的通信(也可以采用 IPVS,IPVS 同样是基于 Netfilter 的),这种通信的本质就是一种 NAT 访问。对于 Linux 用户,以上都是相当基础的网络常识,但如果你平常较少在 Linux 系统下工作,就可能需要一些用 iptables 充当防火墙过滤数据、充当作路由器转发数据、充当作网关做 NAT 转换的实际例子来帮助理解,由于这些操作在网上很容易就能找到,笔者便不专门去举例说明了。
行文至此,本章用了两个小节的篇幅去介绍 Linux 下网络通信的协议栈模型,以及程序如何干涉在协议栈中流动的信息,它们与虚拟化并没有什么直接关系,是整个 Linux 网络通信的必要基础。从下一节开始,我们就要开始专注于与网络虚拟化密切相关的内容了。
虚拟化网络设备
虚拟化网络并不需要完全遵照物理网络的样子来设计,不过,由于已有大量现成的代码原本就是面向于物理存在的网络设备来编码实现的,也有出于方便理解和知识继承的方面的考虑,虚拟化网络与物理网络中的设备还是有相当高的相似性。所以,笔者准备从网络中那些与网卡、交换机、路由器等对应的虚拟设施,以及如何使用这些虚拟设施来组成网络入手,来介绍容器间网络的通信基础设施。
网卡:tun/tap、veth
目前主流的虚拟网卡方案有tun/tap和veth两种,在时间上 tun/tap 出现得更早,它是一组通用的虚拟驱动程序包,里面包含了两个设备,分别是用于网络数据包处理的虚拟网卡驱动,以及用于内核空间与用户空间交互的字符设备(Character Devices,这里具体指/dev/net/tun)驱动。大概在 2000 年左右,Solaris 系统为了实现隧道协议(Tunneling Protocol)开发了这套驱动,从 Linux Kernel 2.1 版开始移植到 Linux 内核中,当时是源码中的可选模块,2.4 版之后发布的内核都会默认编译 tun/tap 的驱动。
tun 和 tap 是两个相对独立的虚拟网络设备,其中 tap 模拟了以太网设备,操作二层数据包(以太帧),tun 则模拟了网络层设备,操作三层数据包(IP 报文)。使用 tun/tap 设备的目的是实现把来自协议栈的数据包先交由某个打开了/dev/net/tun字符设备的用户进程处理后,再把数据包重新发回到链路中。你可以通俗地将它理解为这块虚拟化网卡驱动一端连接着网络协议栈,另一端连接着用户态程序,而普通的网卡驱动则是一端连接则网络协议栈,另一端连接着物理网卡。只要协议栈中的数据包能被用户态程序截获并加工处理,程序员就有足够的舞台空间去玩出各种花样,譬如数据压缩、流量加密、透明代理等功能都能够以此为基础来实现,以最典型的 VPN 应用程序为例,程序发送给 tun 设备的数据包,会经过如图 12-3 所示的顺序流进 VPN 程序:
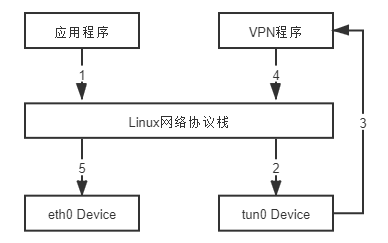
图 12-3 VPN 中数据流动示意图
应用程序通过 tun 设备对外发送数据包后,tun 设备如果发现另一端的字符设备已被 VPN 程序打开(这就是一端连接着网络协议栈,另一端连接着用户态程序),便会把数据包通过字符设备发送给 VPN 程序,VPN 收到数据包,会修改后再重新封装成新报文,譬如数据包原本是发送给 A 地址的,VPN 把整个包进行加密,然后作为报文体,封装到另一个发送给 B 地址的新数据包当中。这种将一个数据包套进另一个数据包中的处理方式被形象地形容为“隧道”(Tunneling),隧道技术是在物理网络中构筑逻辑网络的经典做法。而其中提到的加密,也有标准的协议可遵循,譬如IPSec协议。
使用 tun/tap 设备传输数据需要经过两次协议栈,不可避免地会有一定的性能损耗,如果条件允许,容器对容器的直接通信并不会把 tun/tap 作为首选方案,一般是基于稍后介绍的 veth 来实现的。但是 tun/tap 没有 veth 那样要求设备成对出现、数据要原样传输的限制,数据包到用户态程序后,程序员就有完全掌控的权力,要进行哪些修改,要发送到什么地方,都可以编写代码去实现,因此 tun/tap 方案比起 veth 方案有更广泛的适用范围。
veth 是另一种主流的虚拟网卡方案,在 Linux Kernel 2.6 版本,Linux 开始支持网络名空间隔离的同时,也提供了专门的虚拟以太网(Virtual Ethernet,习惯简写做 veth)让两个隔离的网络名称空间之间可以互相通信。直接把 veth 比喻成是虚拟网卡其实并不十分准确,如果要和物理设备类比,它应该相当于由交叉网线连接的一对物理网卡。
额外知识:直连线序、交叉线序
交叉网线是指一头是 T568A 标准,另外一头是 T568B 标准的网线。直连网线则是两头采用同一种标准的网线。
网卡对网卡这样的同类设备需要使用交叉线序的网线来连接,网卡到交换机、路由器就采用直连线序的网线,不过现在的网卡大多带有线序翻转功能,直连线也可以网卡对网卡地连通了。
veth 实际上不是一个设备,而是一对设备,因而也常被称作 veth pair。要使用 veth,必须在两个独立的网络名称空间中进行才有意义,因为 veth pair 是一端连着协议栈,另一端彼此相连的,在 veth 设备的其中一端输入数据,这些数据就会从设备的另外一端原样不变地流出,它工作时数据流动如图 12-4 所示:
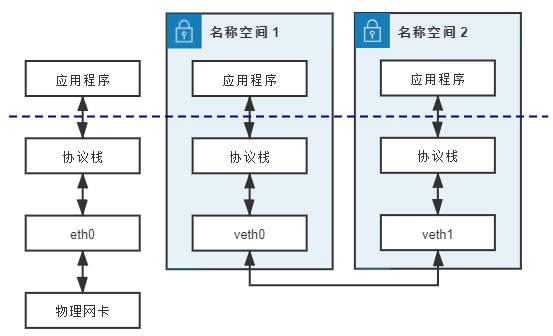
图 12-4 veth pair 工作示意图
由于两个容器之间采用 veth 通信不需要反复多次经过网络协议栈,这让 veth 比起 tap/tun 具有更好的性能,也让 veth pair 的实现变的十分简单,内核中只用了几十行代码实现了一个数据复制函数就完成了 veth 的主体功能。veth 以模拟网卡直连的方式很好地解决了两个容器之间的通信问题,然而对多个容器间通信,如果仍然单纯只用 veth pair 的话,事情就会变得非常麻烦,让每个容器都为与它通信的其他容器建立一对专用的 veth pair 并不实际,这时就迫切需要有一台虚拟化的交换机来解决多容器之间的通信问题了。
交换机:Linux Bridge
既然有了虚拟网卡,很自然也会联想到让网卡接入到交换机里,实现多个容器间的相互连接。Linux Bridge便是 Linux 系统下的虚拟化交换机,虽然它以“网桥”(Bridge)而不是“交换机”(Switch)为名,然而使用过程中,你会发现 Linux Bridge 的目的看起来像交换机,功能使用起来像交换机、程序实现起来也像交换机,实际就是一台虚拟交换机。
Linux Bridge 是在 Linux Kernel 2.2 版本开始提供的二层转发工具,由brctl命令创建和管理。Linux Bridge 创建以后,便能够接入任何位于二层的网络设备,无论是真实的物理设备(譬如 eth0)抑或是虚拟的设备(譬如 veth 或者 tap)都能与 Linux Bridge 配合工作。当有二层数据包(以太帧)从网卡进入 Linux Bridge,它将根据数据包的类型和目标 MAC 地址,按如下规则转发处理:
- 如果数据包是广播帧,转发给所有接入网桥的设备。
- 如果数据包是单播帧:
- 且 MAC 地址在地址转发表中不存在,则洪泛)(Flooding)给所有接入网桥的设备,并将响应设备的接口与 MAC 地址学习(MAC Learning)到自己的 MAC 地址转发表中。
- 且 MAC 地址在地址转发表中已存在,则直接转发到地址表中指定的设备。
- 如果数据包是此前转发过的,又重新发回到此 Bridge,说明冗余链路产生了环路。由于以太帧不像 IP 报文那样有 TTL 来约束,因此一旦出现环路,如果没有额外措施来处理的话就会永不停歇地转发下去。对于这种数据包就需要交换机实现生成树协议(Spanning Tree Protocol,STP)来交换拓扑信息,生成唯一拓扑链路以切断环路。
上面提到的这些名词,譬如二层转发、泛洪、STP、MAC 学习、地址转发表,等等,都是物理交换机中极为成熟的概念,它们在 Linux Bridge 中都有对应的实现,所以说 Linux Bridge 不仅用起来像交换机,实现起来也像交换机。不过,它与普通的物理交换机也还是有一点差别的,普通交换机只会单纯地做二层转发,Linux Bridge 却还支持把发给它自身的数据包接入到主机的三层的协议栈中。
对于通过brctl命令显式接入网桥的设备,Linux Bridge 与物理交换机的转发行为是完全一致的,也不允许给接入的设备设置 IP 地址,因为网桥是根据 MAC 地址做二层转发的,就算设置了三层的 IP 地址也毫无意义。然而 Linux Bridge 与普通交换机的区别是除了显式接入的设备外,它自己也无可分割地连接着一台有着完整网络协议栈的 Linux 主机,因为 Linux Bridge 本身肯定是在某台 Linux 主机上创建的,可以看作 Linux Bridge 有一个与自己名字相同的隐藏端口,隐式地连接了创建它的那台 Linux 主机。因此,Linux Bridge 允许给自己设置 IP 地址,比普通交换机多出一种特殊的转发情况:
- 如果数据包的目的 MAC 地址为网桥本身,并且网桥有设置了 IP 地址的话,那该数据包即被认为是收到发往创建网桥那台主机的数据包,此数据包将不会转发到任何设备,而是直接交给上层(三层)协议栈去处理。
此时,网桥就取代了 eth0 设备来对接协议栈,进行三层协议的处理。设置这条特殊转发规则的好处是:只要通过简单的 NAT 转换,就可以实现一个最原始的单 IP 容器网络。这种组网是最基本的容器间通信形式,笔者举个具体例子来帮助你理解。假设现有如下设备,它们的连接情况如图所示,具体配置为:
- 网桥 br0:分配 IP 地址 192.168.31.1;
- 容器:三个网络名称空间(容器),分别编号为 1、2、3,均使用 veth pair 接入网桥,且有如下配置:
- 在容器一端的网卡名为 veth0,在网桥一端网卡名为 veth1、veth2、veth3;
- 三个容器中的 veth0 网卡分配 IP 地址:192.168.1.10、192.168.1.11、192.168.1.12;
- 三个容器中的 veth0 网卡设置网关为网桥,即 192.168.31.1;
- 网桥中的 veth1、veth2、veth3 无 IP 地址;
- 物理网卡 eth0:分配的 IP 地址 14.123.254.86;
- 外部网络:外部网络中有一台服务器,地址为 122.246.6.183
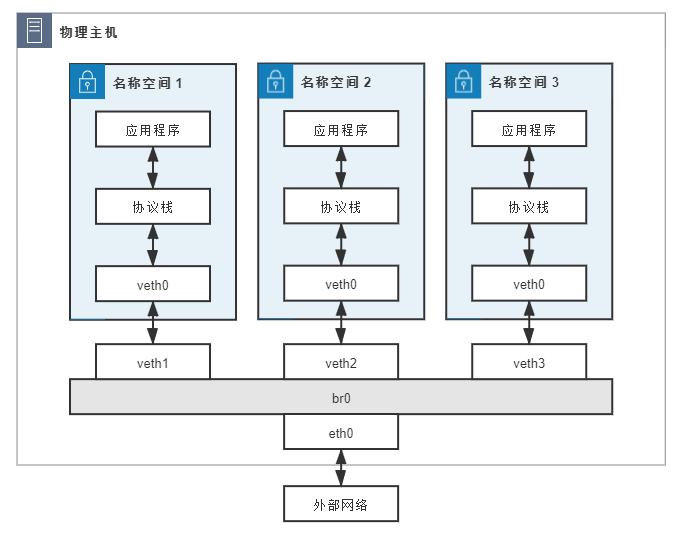
图 12-5 Linux Bridge 构建单 IP 容器网络
如果名称空间 1 中的应用程序想访问外网地址为 122.246.6.183 的服务器,由于容器没有自己的公网 IP 地址,程序发出的数据包必须经过如下步骤处理后,才能最终到达外网服务器:
应用程序调用 Socket API 发送数据,此时生成的原始数据包为:
- 源 MAC:veth0 的 MAC
- 目标 MAC:网关的 MAC(即网桥的 MAC)
- 源 IP:veth0 的 IP,即 192.168.31.1
- 目标 IP:外网的 IP,即 122.246.6.183
从 veth0 发送的数据,会在 veth1 中原样出来,网桥将会从 veth1 中接收到一个目标 MAC 为自己的数据包,并且网桥有配置 IP 地址,由此触发了 Linux Bridge 的特殊转发规则。这个数据包便不会转发给任何设备,而是转交给主机的协议栈处理。
注意,从这步以后就是三层路由了,已不在网桥的工作范围之内,是由 Linux 主机依靠 Netfilter 进行 IP 转发(IP Forward)去实现的。数据包经过主机协议栈,Netfilter 的钩子被激活,预置好的 iptables NAT 规则会修改数据包的源 IP 地址,将其改为物理网卡 eth0 的 IP 地址,并在映射表中记录设备端口及两个 IP 地址之间的对应关系,经过 SNAT 之后的数据包,最终会从 eth0 出去,此时报文头中的地址为:
- 源 MAC:eth0 的 MAC
- 目标 MAC:下一跳(Hop)的 MAC
- 源 IP:eth0 的 IP,即 14.123.254.86
- 目标 IP:外网的 IP,即 122.246.6.183
可见,经过主机协议栈后,数据包的源和目标 IP 地址均为公网的 IP,这个数据包在外部网络中可以根据 IP 正确路由到目标服务器手上。当目标服务器处理完毕,对该请求发出响应后,返回数据包的目标地址也是公网 IP。当返回的数据包经过链路所有跳点,由 eth0 达到网桥时,报文头中的地址为:
- 源 MAC:eth0 的 MAC
- 目标 MAC:网桥的 MAC
- 源 IP:外网的 IP,即 122.246.6.183
- 目标 IP:eth0 的 IP,即 14.123.254.86
可见,这同样是一个以网桥 MAC 地址为目标的数据包,同样会触发特殊转发规则,交由协议栈处理。此时 Linux 将根据映射表中的转换关系做 DNAT 转换,把目标 IP 地址从 eth0 替换回 veth0 的 IP,最终 veth0 收到的响应数据包为:
- 源 MAC:网桥的 MAC
- 目标 MAC:veth0 的 MAC
- 源 IP:外网的 IP,即 122.246.6.183
- 目标 IP:veth0 的 IP,即 192.168.31.1
在以上处理过程中,Linux 主机独立承担了三层路由的职责,一定程度上扮演了路由器的角色。由于有 Netfilter 的存在,对网络层的路由转发,就无须像 Linux Bridge 一样专门提供brctl这样的命令去创建一个虚拟设备,通过 Netfilter 很容易就能在 Linux 内核完成根据 IP 地址进行路由的功能,你也可以理解为 Linux Bridge 是一个人工创建的虚拟交换机,而 Linux 内核则是一个天然的虚拟路由器。
限于篇幅,笔者仅举例介绍 Linux Bridge 这一种虚拟交换机的方案,此外还有 OVS(Open vSwitch)等同样常见,而且更强大、更复杂的方案这里就不再涉及了。
网络:VXLAN
有了虚拟化网络设备后,下一步就是要使用这些设备组成网络,容器分布在不同的物理主机上,每一台物理主机都有物理网络相互联通,然而这种网络的物理拓扑结构是相对固定的,很难跟上云原生时代的分布式系统的逻辑拓扑结构变动频率,譬如服务的扩缩、断路、限流,等等,都可能要求网络跟随做出相应的变化。正因如此,软件定义网络(Software Defined Network,SDN)的需求在云计算和分布式时代变得前所未有地迫切,SDN 的核心思路是在物理的网络之上再构造一层虚拟化的网络,将控制平面和数据平面分离开来,实现流量的灵活控制,为核心网络及应用的创新提供良好的平台。SDN 里位于下层的物理网络被称为 Underlay,它着重解决网络的连通性与可管理性,位于上层的逻辑网络被称为 Overlay,它着重为应用提供与软件需求相符的传输服务和网络拓扑。
软件定义网络已经发展了十余年时间,远比云原生、微服务这些概念出现得更早。网络设备商基于硬件设备开发出了 EVI(Ethernet Virtualization Interconnect)、TRILL(Transparent Interconnection of Lots of Links)、SPB(Shortest Path Bridging)等大二层网络技术;软件厂商也提出了 VXLAN(Virtual eXtensible LAN)、NVGRE(Network Virtualization Using Generic Routing Encapsulation)、STT(A Stateless Transport Tunneling Protocol for Network Virtualization)等一系列基于虚拟交换机实现的 Overlay 网络。由于跨主机的容器间通信,用的大多是 Overlay 网络,本节里,笔者会以 VXLAN 为例去介绍 Overlay 网络的原理。
VXLAN 你有可能没听说过,但VLAN相信只要从事计算机专业的人都有所了解。VLAN 的全称是“虚拟局域网”(Virtual Local Area Network),从名称来看它也算是网络虚拟化技术的早期成果之一了。由于二层网络本身的工作特性决定了它非常依赖于广播,无论是广播帧(如 ARP 请求、DHCP、RIP 都会产生广播帧),还是泛洪路由,其执行成本都随着接入二层网络设备数量的增长而等比例增加,当设备太多,广播又频繁的时候,很容易就会形成广播风暴(Broadcast Radiation)。因此,VLAN 的首要职责就是划分广播域,将连接在同一个物理网络上的设备区分开来,划分的具体方法是在以太帧的报文头中加入 VLAN Tag,让所有广播只针对具有相同 VLAN Tag 的设备生效。这样既缩小了广播域,也附带提高了安全性和可管理性,因为两个 VLAN 之间不能直接通信。如果确有通信的需要,就必须通过三层设备来进行,譬如使用单臂路由(Router on a Stick)或者三层交换机。
然而 VLAN 有两个明显的缺陷,第一个缺陷在于 VLAN Tag 的设计,定义 VLAN 的802.1Q 规范是在 1998 年提出的,当时的网络工程师完全不可能预料到未来云计算会如此地普及,因而只给 VLAN Tag 预留了 32 Bits 的存储空间,其中还要分出 16 Bits 存储标签协议识别符(Tag Protocol Identifier)、3 Bits 存储优先权代码点(Priority Code Point)、1 Bit 存储标准格式指示(Canonical Format Indicator),剩下的 12 Bits 才能用来存储 VLAN ID(Virtualization Network Identifier,VNI),换而言之,VLAN ID 最多只能有 212=4096 种取值。当云计算数据中心出现后,即使不考虑虚拟化的需求,单是需要分配 IP 的物理设备都有可能数以万计甚至数以十万计,这样 4096 个 VLAN 肯定是不够用的。后来 IEEE 的工程师们又提出802.1AQ 规范力图补救这个缺陷,大致思路是给以太帧连续打上两个 VLAN Tag,每个 Tag 里仍然只有 12 Bits 的 VLAN ID,但两个加起来就可以存储 224=16,777,216 个不同的 VLAN ID 了,由于两个 VLAN Tag 并排放在报文头上,802.1AQ 规范还有了个 QinQ(802.1Q in 802.1Q)的昵称别名。
QinQ 是 2011 年推出的规范,但是直到现在都并没有特别普及,除了需要设备支持外,它还解决不了 VLAN 的第二个缺陷:跨数据中心传递。VLAN 本身是为二层网络所设计的,但是在两个独立数据中心之间,信息只能够通过三层网络传递,由于云计算的发展普及,大型分布式系统已不局限于单个数据中心,完全有跨数据中心运作的可能性,此时如何让 VLAN Tag 在两个数据中心间传递又成了不得不考虑的麻烦事。
为了统一解决以上两个问题,IETF 定义了 VXLAN 规范,这是三层虚拟化网络(Network Virtualization over Layer 3,NVO3)的标准技术规范之一,是一种典型的 Overlay 网络。VXLAN 采用 L2 over L4 (MAC in UDP)的报文封装模式,把原本在二层传输的以太帧放到四层 UDP 协议的报文体内,同时加入了自己定义的 VXLAN Header。在 VXLAN Header 里直接就有 24 Bits 的 VLAN ID,同样可以存储 1677 万个不同的取值,VXLAN 让二层网络得以在三层范围内进行扩展,不再受数据中心间传输的限制。VXLAN 的整个报文结构如图 12-6 所示:
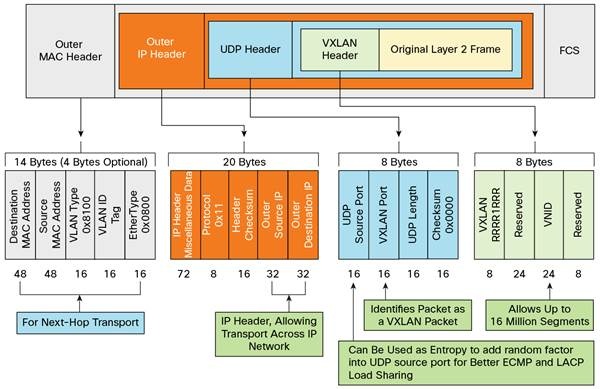
VXLAN 报文结构
(图片来源:Orchestrating EVPN VXLAN Services with Cisco NSO)
VXLAN 对网络基础设施的要求很低,不需要专门的硬件提供的特别支持,只要三层可达的网络就能部署 VXLAN。VXLAN 网络的每个边缘入口上布置有一个 VTEP(VXLAN Tunnel Endpoints)设备,它既可以是物理设备,也可以是虚拟化设备,负责 VXLAN 协议报文的封包和解包。互联网号码分配局(Internet Assigned Numbers Authority,IANA)专门分配了 4789 作为 VTEP 设备的 UDP 端口(以前 Linux VXLAN 用的默认端口是 8472,目前这两个端口在许多场景中仍有并存的情况)。
从 Linux Kernel 3.7 版本起,Linux 系统就开始支持 VXLAN。到了 3.12 版本,Linux 对 VXLAN 的支持已达到完全完备的程度,能够处理单播和组播,能够运行于 IPv4 和 IPv6 之上,一台 Linux 主机经过简单配置之后,便可以把 Linux Bridge 作为 VTEP 设备使用。
VXLAN 带来了很高的灵活性、扩展性和可管理性,同一套物理网络中可以任意创建多个 VXLAN 网络,每个 VXLAN 中接入的设备都仿佛是在一个完全独立的二层局域网中一样,不会受到外部广播的干扰,也很难遭受外部的攻击,这使得 VXLAN 能够良好地匹配分布式系统的弹性需求。不过,VXLAN 也带来了额外的复杂度和性能开销,具体表现在:
- 传输效率的下降,如果你仔细数过前面 VXLAN 报文结构中 UDP、IP、以太帧报文头的字节数,会发现经过 VXLAN 封装后的报文,新增加的报文头部分就整整占了 50 Bytes(VXLAN 报文头占 8 Bytes,UDP 报文头占 8 Bytes,IP 报文头占 20 Bytes,以太帧的 MAC 头占 14 Bytes),而原本只需要 14 Bytes 而已,而且现在这 14 Bytes 的消耗也还在,被封到了最里面的以太帧中。以太网的MTU是 1500 Bytes,如果是传输大量数据,额外损耗 50 Bytes 并不算很高的成本,但如果传输的数据本来就只有几个 Bytes 的话,那传输消耗在报文头上的成本就很高昂了。
- 传输性能的下降,每个 VXLAN 报文的封包和解包操作都属于额外的处理过程,尤其是用软件来实现的 VTEP,额外的运算资源消耗有时候会成为不可忽略的性能影响因素。
副本网卡:MACVLAN
理解了 VLAN 和 VXLAN 的原理后,我们就有足够的前置知识去了解MACVLAN这最后一种网络设备虚拟化的方式了。
前文中提到过,两个 VLAN 之间是完全二层隔离的,不存在重合的广播域,因此要通信就只能通过三层设备,最简单的三层通信就是靠单臂路由了。笔者以图 12-7 所示的网络拓扑结构来举个具体例子,介绍单臂路由是如何工作的:
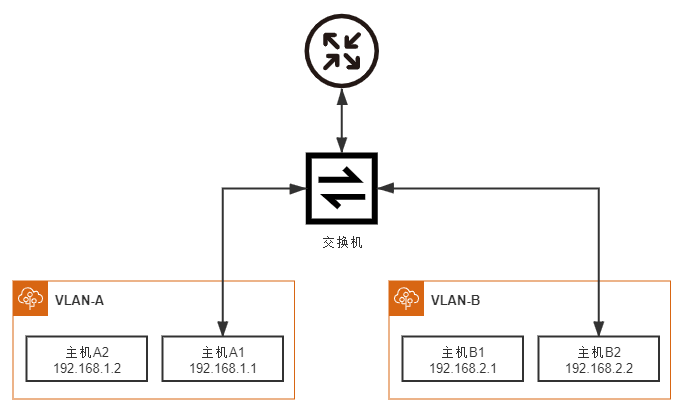
图 12-7 VLAN 单臂路由原理
假设位于 VLAN-A 中的主机 A1 希望将数据包发送给 VLAN-B 中的主机 B2,由于 A、B 两个 VLAN 之间二层链路不通,因此引入了单臂路由,单臂路由不属于任何 VLAN,它与交换机之间的链路允许任何 VLAN ID 的数据包通过,这种接口被称为 TRUNK。这样,A1 要和 B2 通信,A1 就将数据包先发送给路由(只需把路由设置为网关即可做到),然后路由根据数据包上的 IP 地址得知 B2 的位置,去掉 VLAN-A 的 VLAN Tag,改用 VLAN-B 的 VLAN Tag 重新封装数据包后发回给交换机,交换机收到后就可以顺利转发给 B2 了。这个过程并没什么复杂的地方,但你是否注意到一个问题,路由器应该设置怎样的 IP 地址呢?由于 A1、B2 各自处于独立的网段上,它们又各自要将同一个路由作为网关使用,这就要求路由器必须同时具备 192.168.1.0/24 和 192.168.2.0/24 的 IP 地址。如果真的就只有 VLAN-A、VLAN-B 两个 VLAN,那把路由器上的两个接口分别设置不同的 IP 地址,然后用两条网线分别连接到交换机上也勉强算是一个解决办法,但 VLAN 最多支持 4096 个 VLAN,如果要接四千多条网线就太离谱了。为了解决这个问题,802.1Q 规范中专门定义了子接口(Sub-Interface)的概念,其作用是允许在同一张物理网卡上,针对不同的 VLAN 绑定不同的 IP 地址。
MACVLAN 借用了 VLAN 子接口的思路,并且在这个基础上更进一步,不仅允许对同一个网卡设置多个 IP 地址,还允许对同一张网卡上设置多个 MAC 地址,这也是 MACVLAN 名字的由来。原本 MAC 地址是网卡接口的“身份证”,应该是严格的一对一关系,而 MACVLAN 打破这层关系,方法是在物理设备之上、网络栈之下生成多个虚拟的 Device,每个 Device 都有一个 MAC 地址,新增 Device 的操作本质上相当于在系统内核中注册了一个收发特定数据包的回调函数,每个回调函数都能对一个 MAC 地址的数据包进行响应,当物理设备收到数据包时,会先根据 MAC 地址进行一次判断,确定交给哪个 Device 来处理,如图 12-8 所示。以交换机一侧的视角来看,这个端口后面仿佛是另一台已经连接了多个设备的交换机一样。
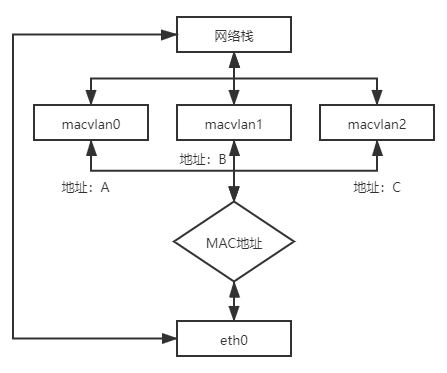
图 12-8 MACVLAN 原理
用 MACVLAN 技术虚拟出来的副本网卡,在功能上和真实的网卡是完全对等的,此时真正的物理网卡实际上确实承担着类似交换机的职责,收到数据包后,根据目标 MAC 地址判断这个包应转发给哪块副本网卡处理,由同一块物理网卡虚拟出来的副本网卡,天然处于同一个 VLAN 之中,可以直接二层通信,不需要将流量转发到外部网络。
与 Linux Bridge 相比,这种以网卡模拟交换机的方法在目标上并没有本质的不同,但 MACVLAN 在内部实现上要比 Linux Bridge 轻量得多。从数据流来看,副本网卡的通信只比物理网卡多了一次判断而已,能获得很高的网络通信性能;从操作步骤来看,由于 MAC 地址是静态的,所以 MACVLAN 不需要像 Linux Bridge 那样考虑 MAC 地址学习、STP 协议等复杂的算法,这进一步突出了 MACVLAN 的性能优势。
除了模拟交换机的 Bridge 模式外,MACVLAN 还支持虚拟以太网端口聚合模式(Virtual Ethernet Port Aggregator,VEPA)、Private 模式、Passthru 模式、Source 模式等另外几种工作模式,有兴趣的读者可以参考相关资料,笔者就不再逐一介绍了。
容器间通信
经过对虚拟化网络基础知识的一番铺垫后,在最后这个小节里,我们尝试使用这些知识去解构容器间的通信原理了,毕竟运用知识去解决问题才是笔者介绍网络虚拟化的根本目的。这节我们先以 Docker 为目标,谈一谈Docker 所提供的容器通信方案。下一节介绍过 CNI 下的 Kubernetes 网络插件生态后,你也许会觉得 Docker 的网络通信相对简单,对于某些分布式系统的需求来说甚至是过于简陋了,然而,容器间的网络方案多种多样,但通信主体都是固定的,不外乎没有物理设备的虚拟主体(容器、Pod、Service、Endpoints 等等)、不需要跨网络的本地主机、以及通过网络连接的外部主机三种层次,所有的容器网络通信问题,都可以归结为本地主机内部的多个容器之间、本地主机与内部容器之间和跨越不同主机的多个容器之间的通信问题,其中的许多原理都是相通的,所以 Docker 网络的简单,在作为检验前面网络知识有没有理解到位时倒不失为一种优势。
Docker 的网络方案在操作层面上是指能够直接通过docker run --network参数指定的网络,或者先docker network create创建后再被容器使用的网络。安装 Docker 过程中会自动在宿主机上创建一个名为 docker0 的网桥,以及三种不同的 Docker 网络,分别是 bridge、host 和 none,你可以通过docker network ls命令查看到这三种网络,具体如下所示:
$ docker network ls
NETWORK ID NAME DRIVER SCOPE
2a25170d4064 bridge bridge local
a6867d58bd14 host host local
aeb4f8df39b1 none null local这三种网络,对应着 Docker 提供的三种开箱即用的网络方案,它们分别为:
- 桥接模式,使用
--network=bridge指定,这种也是未指定网络参数时的默认网络。桥接模式下,Docker 会为新容器分配独立的网络名称空间,创建好 veth pair,一端接入容器,另一端接入到 docker0 网桥上。Docker 为每个容器自动分配好 IP 地址,默认配置下地址范围是 172.17.0.0/24,docker0 的地址默认是 172.17.0.1,并且设置所有容器的网关均为 docker0,这样所有接入同一个网桥内的容器直接依靠二层网络来通信,在此范围之外的容器、主机就必须通过网关来访问,具体过程笔者在介绍 Linux Bridge 时已经举例详细讲解过。 - 主机模式,使用
--network=host指定。主机模式下,Docker 不会为新容器创建独立的网络名称空间,这样容器一切的网络设施,如网卡、网络栈等都直接使用宿主机上的真实设施,容器也就不会拥有自己独立的 IP 地址。此模式下与外界通信无须进行 NAT 转换,没有性能损耗,但缺点也十分明显,没有隔离就无法避免网络资源的冲突,譬如端口号就不允许重复。 - 空置模式,使用
--network=none指定,空置模式下,Docker 会给新容器创建独立的网络名称空间,但是不会创建任何虚拟的网络设备,此时容器能看到的只有一个回环设备(Loopback Device)而已。提供这种方式是为了方便用户去做自定义的网络配置,如自己增加网络设备、自己管理 IP 地址,等等。
除了三种开箱即用的网络外,Docker 还支持以下由用户自行创建的网络:
- 容器模式,创建容器后使用
--network=container:容器名称指定。容器模式下,新创建的容器将会加入指定的容器的网络名称空间,共享一切的网络资源,但其他资源,如文件、PID 等默认仍然是隔离的。两个容器间可以直接使用回环地址(localhost)通信,端口号等网络资源不能有冲突。 - MACVLAN 模式:使用
docker network create -d macvlan创建,此网络允许为容器指定一个副本网卡,容器通过副本网卡的 MAC 地址来使用宿主机上的物理设备,在追求通信性能的场合,这种网络是最好的选择。Docker 的 MACVLAN 只支持 Bridge 通信模式,因此在功能表现上与桥接模式相类似。 - Overlay 模式:使用
docker network create -d overlay创建,Docker 说的 Overlay 网络实际上就是特指 VXLAN,这种网络模式主要用于 Docker Swarm 服务之间进行通信。然而由于 Docker Swarm 败于 Kubernetes,并未成为主流,所以这种网络模式实际很少使用。
容器网络与生态
容器网络的第一个业界标准源于 Docker 在 2015 年发布的libnetwork项目,如果你还记得在“容器的崛起”中关于libcontainer的故事,那从名字上就很容易推断出 libnetwork 项目的目的与意义所在。这是 Docker 用 Golang 编写的、专门用来抽象容器间网络通信的一个独立模块,与 libcontainer 是作为 OCI 的标准实现类似,libnetwork 是作为 Docker 提出的 CNM 规范(Container Network Model)的标准实现而设计的。不过,与 libcontainer 因孵化出 runC 项目,时至今日仍然广为人知的结局不同,libnetwork 随着 Docker Swarm 的失败,已经基本失去了实用价值,只具备历史与学术研究方面的价值了。
CNM 与 CNI
如今容器网络的事实标准CNI(Container Networking Interface)与 CNM 在目标上几乎是完全重叠的,由此决定了 CNI 与 CNM 之间只能是你死我活的竞争关系,这与容器运行时中提及的 CRI 和 OCI 的关系明显不同,CRI 与 OCI 目标并不一样,两者有足够空间可以和平共处。
尽管 CNM 规范已是明日黄花,但它作为容器网络的先行者,对后续的容器网络标准制定有直接的指导意义,提出容器网络标准的目的就是为了把网络功能从容器运行时引擎或者容器编排系统中剥离出去,网络的专业性和针对性极强,如果不把它变成外部可扩展的功能,都由自己来做的话,不仅费时费力,还难以讨好。这个特点从图 12-9 所列的一大堆容器网络提供商就可见一斑。

图 12-9 部分容器网络提供商
网络的专业性与针对性也决定了 CNM 和 CNI 均采用了插件式的设计,需要接入什么样的网络,就设计一个对应的网络插件即可。所谓的插件,在形式上也就是一个可执行文件,再配上相应的 Manifests 描述。为了方便插件编写,CNM 将协议栈、网络接口(对应于 veth、tap/tun 等)和网络(对应于 Bridge、VXLAN、MACVLAN 等)分别抽象为 Sandbox、Endpoint 和 Network,并在接口的 API 中提供了这些抽象资源的读写操作。而 CNI 中尽管也有 Sandbox、Network 的概念,含义也与 CNM 大致相同,不过在 Kubernetes 资源模型的支持下,它就无须刻意地强调某一种网络资源应该如何描述、如何访问了,因此结构上显得更加轻便。
从程序功能上看,CNM 和 CNI 的网络插件提供的能力都能划分为网络的管理与 IP 地址的管理两类,插件可以选择只实现其中的某一个,也可以全部都实现:
管理网络创建与删除。解决如何创建网络,如何将容器接入到网络,以及容器如何退出和删除网络。这个过程实际上是对容器网络的生命周期管理,如果你更熟悉 Docker 命令,可以类比理解为基本上等同于
docker network命令所做事情。CNM 规范中定义了创建网络、删除网络、容器接入网络、容器退出网络、查询网络信息、创建通信 Endpoint、删除通信 Endpoint 等十个编程接口,而 CNI 中就更加简单了,只要实现对网络的增加与删除两项操作即可。你甚至不需要学过 Golang 语言,只从名称上都能轻松看明白以下接口中每个方法的含义是什么:type CNI interface { AddNetworkList (net *NetworkConfigList, rt *RuntimeConf) (types.Result, error) DelNetworkList (net *NetworkConfigList, rt *RuntimeConf) error AddNetwork (net *NetworkConfig, rt *RuntimeConf) (types.Result, error) DelNetwork (net *NetworkConfig, rt *RuntimeConf) error }管理 IP 地址分配与回收。解决如何为三层网络分配唯一的 IP 地址的问题,二层网络的 MAC 地址天然就具有唯一性,无须刻意地考虑如何分配的问题。但是三层网络的 IP 地址只有通过精心规划,才能保证在全局网络中都是唯一的,否则,如果两个容器之间可能存在相同地址,那它们就最多只能做 NAT,而不可能做到直接通信。
相比起基于 UUID 或者数字序列实现的全局唯一 ID 产生器,IP 地址的全局分配工作要更加困难一些,首先是要符合 IPv4 的网段规则,且保证不重复,这在分布式环境里只能依赖 Etcd、ZooKeeper 等协调工具来实现,Docker 自己也提供了类似的 libkv 来完成这项工作。其次是必须考虑到回收的问题,否则一旦 Pod 发生持续重启就有可能耗尽某个网段中的所有地址。最后还必须要关注时效性,原本 IP 地址的获取采用标准的DHCP协议(Dynamic Host Configuration Protocol)即可,但 DHCP 有可能产生长达数秒的延迟,对于某些生存周期很短的 Pod,这已经超出了它的忍受限度,因此在容器网络中,往往 Host-Local 的 IP 分配方式会比 DHCP 更加实用。
CNM 到 CNI
容器网络标准能够提供一致的网络操作界面,不论是什么网络插件都使用一致的 API,提高了网络配置的自动化程度和在不同网络间迁移的体验,对最终用户、容器提供商、网络提供商来说都是三方共赢的事情。
CNM 规范发布以后,借助 Docker 在容器领域的强大号召力,很快就得到了网络提供商与开源组织的支持,不说专门为 Docker 设计针对容器互联的网络,最起码也会让现有的网络方案兼容于 CNM 规范,以便能在容器圈中多分一杯羹,譬如 Cisco 的Contiv、OpenStack 的Kuryr、Open vSwitch 的OVN(Open Virtual Networking)以及来自开源项目的Calico和Weave等都是 CNM 阵营中的成员。唯一对 CNM 持有不同意见的是那些和 Docker 存在直接竞争关系的产品,譬如 Docker 的最大竞争对手,来自 CoreOS 公司的RKT容器引擎。其实凭良心说,并不是其他容器引擎想刻意去抵制 CNM,而是 Docker 制定 CNM 规范时完全基于 Docker 本身来设计,并没有考虑 CNM 用于其他容器引擎的可能性。
为了平衡 CNM 规范的影响力,也是为了在 Docker 的垄断背景下寻找一条出路,RKT 提出了与 CNM 目标类似的“RKT 网络提案”(RKT Networking Proposal)。一个业界标准成功与否,很大程度上取决于它支持者阵营的规模,对于容器网络这种插件式的规范更是如此。Docker 力推的 CNM 毫无疑问是当时统一容器网络标准的最有力竞争者,如果没有外力的介入,有极大可能会成为最后的胜利者。然而,影响容器网络发展的外力还是出现了,即使此前笔者没有提过 CNI,你也应该很容易猜到,在容器圈里能够掀翻 Docker 的“外力”,也就唯有 Kubernetes 一家而已。
Kubernetes 开源的初期(Kubernetes 1.5 提出 CRI 规范之前),在容器引擎上是选择彻底绑定于 Docker 的,但是,在容器网络的选择上,Kubernetes 一直都坚持独立于 Docker 自己来维护网络。CNM 和 CNI 提出以前的早期版本里,Kubernetes 会使用 Docker 的空置网络模式(--network=none)来创建 Pause 容器,然后通过内部的 kubenet 来创建网络设施,再让 Pod 中的其他容器加入到 Pause 容器的名称空间中共享这些网络设施。
额外知识:kubenet
kubenet是 kubelet 内置的一个非常简单的网络,采用网桥来解决 Pod 间通信。kubenet 会自动创建一个名为 cbr0 的网桥,当有新的 Pod 启动时,会由 kubenet 自动将其接入 cbr0 网桥中,再将控制权交还给 kubelet,完成后续的 Pod 创建流程。kubenet 采用 Host-Local 的 IP 地址管理方式,具体来说是根据当前服务器对应的 Node 资源上的
PodCIDR字段所设的网段来分配 IP 地址。当有新的 Pod 启动时,会由本地节点的 IP 段中分配一个空闲的 IP 给 Pod 使用。
CNM 规范还未提出之前,Kubernetes 自己来维护网络是必然的结果,因为 Docker 自带的网络基本上只聚焦于如何解决本地通信,完全无法满足 Kubernetes 跨集群节点的容器编排的需要。CNM 规范提出之后,原本 Kubernetes 应该是除 Docker 外最大的受益者才对,CNM 的价值就是能很方便地引入其他网络插件来替代掉 Docker 自带的网络,但 Kubernetes 却对 Docker 的 CNM 规范表现得颇为犹豫,经过一番评估考量,Kubernetes 最终决定去转为支持当时极不成熟的 RKT 的网络提案,与 CoreOS 合作以 RKT 网络提案为基础发展出 CNI 规范。
Kubernetes Network SIG 的 Leader、Google 的工程师 Tim Hockin 专门撰写过一篇文章《Why Kubernetes doesn’t use libnetwork》来解释为何 Kubernetes 要拒绝 CNM 与 libnetwork。当时容器编排战争还处于三国争霸(Kubernetes、Apache Mesos、Docker Swarm)的拉锯阶段,即使强势如 Kubernetes,拒绝 CNM 其实也要冒不小的风险,付出颇大的代价,因为这个决定不可避免会引发一系列技术和非技术的问题,譬如网络提供商要为 Kubernetes 专门编写不同的网络插件、由docker run启动的独立容器将会无法与 Kubernetes 启动的容器直接相互通信,等等。
促使 Kubernetes 拒绝 CNM 的理由也同样有来自于技术和非技术方面的。技术方面,Docker 的网络模型做出了许多对 Kubernetes 无效的假设:Docker 的网络有本地网络(不带任何跨节点协调能力,譬如 Bridge 模式就没有全局统一的 IP 分配)和全局网络(跨主机的容器通信,例如 Overlay 模式)的区别,本地网络对 Kubernetes 来说毫无意义,而全局网络又默认依赖 libkv 来实现全局 IP 地址管理等跨机器的协调工作。这里的 libkv 是 Docker 建立的 lib*家族中另一位成员,用来对标 Etcd、ZooKeeper 等分布式 K/V 存储,这对于已经拥有了 Etcd 的 Kubernetes 来说如同鸡肋。非技术方面,Kubernetes 决定放弃 CNM 的原因很大程度上还是由于他们与 Docker 在发展理念上的冲突,Kubernetes 当时已经开始推进 Docker 从必备依赖变为可选引擎的重构工作,而 Docker 则坚持 CNM 只能基于 Docker 来设计。Tim Hockin 在文章中举了一个例子:CNM 的网络驱动没有向外部暴露网络所连接容器的具体名称,只使用一个内部分配的 ID 来代替,这让外部(包括网络插件和容器编排系统)很难将网络连接的容器与自己管理的容器对应关联起来,当他们向 Docker 开发人员反馈这个问题时,问题被以“工作符合预期结果”(Working as Intended)为理由直接关闭掉,Tim Hockin 还专门列出了这些问题的详细清单,如libnetwork #139、libnetwork #486、libnetwork #514、libnetwork #865、docker #18864,这种设计被 Kubernetes 认为是人为地给非 Docker 的第三方容器引擎使用 CNM 设置障碍。整个沟通过程中,Docker 表现得也极为强硬,明确表示他们对偏离当前路线或委托控制的想法都不太欢迎。上面这些“非技术”的问题,即使没有 Docker 的支持,Kubernetes 自己也并非不能从“技术上”去解决,但 Docker 的理念令 Kubernetes 感到忧虑,因为 Kubernetes 在 Docker 之上扩展的很多功能,Kubernetes 却并不想这些功能永远绑定在 Docker 之上。
CNM 与 libnetwork 是 2015 年 5 月 1 日发布的,CNI 则是在 2015 年 7 月发布,两者正式诞生只相差不到两个月时间,这显然是竞争的需要而非单纯的巧合。五年之后的今天,这场容器网络的话语权之争已经尘埃落定,CNI 获得全面的胜利,除了 Kubernetes 和 RKT 外,Amazon ECS、RedHat OpenShift、Apache Mesos、Cloud Foundry 等容器编排圈子中除了 Docker 之外其他具有影响力的参与者都已宣布支持 CNI 规范,原本已经加入了 CNM 阵营的 Contiv、Calico、Weave 网络提供商也纷纷推出了自己的 CNI 插件。
网络插件生态
时至今日,支持 CNI 的网络插件已多达数十种,笔者不太可能逐一细说,不过,跨主机通信的网络实现方式来去也就下面这三种,我们不妨以网络实现模式为主线,每种模式介绍一个具有代表性的插件,以达到对网络插件生态窥斑见豹的效果。
- Overlay 模式:我们已经学习过 Overlay 网络,知道这是一种虚拟化的上层逻辑网络,好处在于它不受底层物理网络结构的约束,有更大的自由度,更好的易用性;坏处是由于额外的包头封装导致信息密度降低,额外的隧道封包解包会导致传输性能下降。
在虚拟化环境(例如 OpenStack)中的网络限制往往较多,譬如不允许机器之间直接进行二层通信,只能通过三层转发。在这类被限制网络的环境里,基本上就只能选择 Overlay 网络插件,常见的 Overlay 网络插件有 Flannel(VXLAN 模式)、Calico(IPIP 模式)、Weave 等等。
这里以 Flannel-VXLAN 为例,由 CoreOS 开发的 Flannel 可以说是最早的跨节点容器通信解决方案,很多其他网络插件的设计中都能找到 Flannel 的影子。早在 2014 年,VXLAN 还没有进入 Linux 内核的时候,Flannel 就已经开始流行,当时的 Flannel 只能采用自定义的 UDP 封包实现自己私有协议的 Overlay 网络,由于封包、解包的操作只能在用户态中进行,而数据包在内核态的协议栈中流转,这导致数据要反复在用户态、内核态之间拷贝,性能堪忧。从此 Flannel 就给人留下了速度慢的坏印象。VXLAN 进入 Linux 内核后,这种内核态用户态的转换消耗已经完全消失,Flannel-VXLAN 的效率比起 Flannel-UDP 有了很大提升,目前已经成为最常用的容器网络插件之一。 - 路由模式:路由模式其实属于 Underlay 模式的一种特例,这里将它单独作为一种网络实现模式来介绍。相比起 Overlay 网络,路由模式的主要区别在于它的跨主机通信是直接通过路由转发来实现的,因而无须在不同主机之间进行隧道封包。这种模式的好处是性能相比 Overlay 网络有明显提升,坏处是路由转发要依赖于底层网络环境的支持,并不是你想做就能做到的。路由网络要求要么所有主机都位于同一个子网之内,都是二层连通的,要么不同二层子网之间由支持边界网关协议(Border Gateway Protocol,BGP)的路由相连,并且网络插件也同样支持 BGP 协议去修改路由表。
上一节介绍 Linux 网络基础知识时,笔者提到过 Linux 下不需要专门的虚拟路由,因为 Linux 本身就具备路由的功能。路由模式就是依赖 Linux 内置在系统之中的路由协议,将路由表分发到子网的每一台物理主机的。这样,当跨主机访问容器时,Linux 主机可以根据自己的路由表得知该容器具体位于哪台物理主机之中,从而直接将数据包转发过去,避免了 VXLAN 的封包解包而导致的性能降低。 常见的路由网络有 Flannel(HostGateway 模式)、Calico(BGP 模式)等等。
这里以 Flannel-HostGateway 为例,Flannel 通过在各个节点上运行的 Flannel Agent(Flanneld)将容器网络的路由信息设置到主机的路由表上,这样一来,所有的物理主机都拥有整个容器网络的路由数据,容器间的数据包可以被 Linux 主机直接转发,通信效率与裸机直连都相差无几,不过由于 Flannel Agent 只能修改它运行主机上的路由表,一旦主机之间隔了其他路由设备,譬如路由器或者三层交换机,这个包就会在路由设备上被丢掉,要解决这种问题就必须依靠 BGP 路由和 Calico-BGP 这类支持标准 BGP 协议修改路由表的网络插件共同协作才行。 - Underlay 模式:这里的 Underlay 模式特指让容器和宿主机处于同一网络,两者拥有相同的地位的网络方案。Underlay 网络要求容器的网络接口能够直接与底层网络进行通信,因此该模式是直接依赖于虚拟化设备与底层网络能力的。常见的 Underlay 网络插件有 MACVLAN、SR-IOV(Single Root I/O Virtualization)等。
对于真正的大型数据中心、大型系统,Underlay 模式才是最有发展潜力的网络模式。这种方案能够最大限度地利用硬件的能力,往往有着最优秀的性能表现。但也是由于它直接依赖于硬件与底层网络环境,必须根据软、硬件情况来进行部署,难以做到 Overlay 网络那样开箱即用的灵活性
这里以 SR-IOV 为例,SR-IOV 不是某种专门的网络名字,而是一种将PCIe设备共享给虚拟机使用的硬件虚拟化标准,目前用在网络设备上应用比较多,理论上也可以支持其他的 PCIe 硬件。通过 SR-IOV 能够让硬件在虚拟机上实现独立的内存地址、中断和 DMA 流,而无须虚拟机管理系统的介入。对于容器系统来说,SR-IOV 的价值是可以直接在硬件层面虚拟多张网卡,并且以硬件直通(Passthrough)的形式交付给容器使用。但是 SR-IOV 直通部署起来通常都较为繁琐,现在容器用的 SR-IOV 方案不少是使用MACVTAP来对 SR-IOV 网卡进行转接的,MACVTAP 提升了 SR-IOV 的易用性,但是这种转接又会带来额外的性能损失,并不一定会比其他网络方案有更好的表现。
了解过 CNI 插件的大致的实现原理与分类后,相信你的下一个问题就是哪种 CNI 网络最好?如何选择合适的 CNI 插件?选择 CNI 网络插件主要有两方面的考量因素,首先必须是你系统所处的环境是支持的,这点在前面已经有针对性地介绍过。在环境可以支持的前提下,另外一个因素就是性能与功能方面是否合乎你的要求。
性能方面,笔者引用一组测试数据供你参考。这些数据来自于 2020 年 8 月刊登在 IETF 的论文《Considerations for Benchmarking Network Performance in Containerized Infrastructures》,此文中测试了不同 CNI 插件在裸金属服务器之间(BMP to BMP,Bare Metal Pod)、虚拟机之间(VMP to VMP,Virtual Machine Pod)、以及裸金属服务器与虚拟机之间(BMP to VMP)的本地网络和跨主机网络的通信表现。囿于篇幅,这里只列出最具代表性的是裸金属服务器之间的跨主机通信,其结果如图 12-10 与图 12-11 所示:
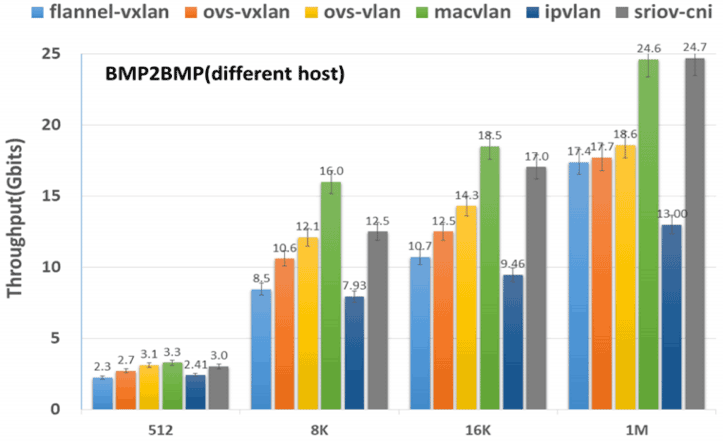
图 12-10 512 Bytes - 1M Bytes 中 TCP 吞吐量(结果越高,性能越好)
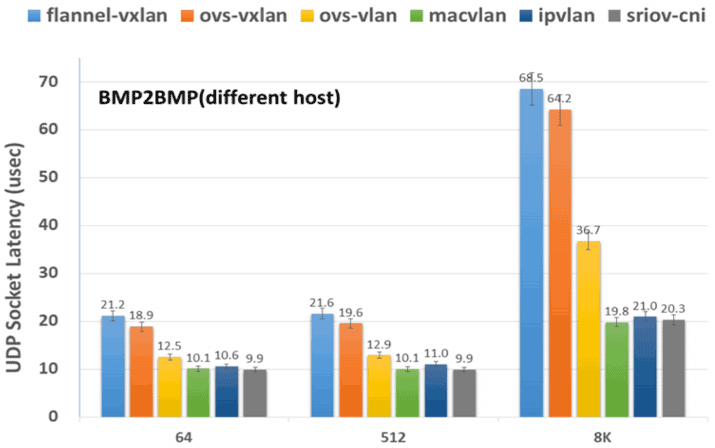
图 12-11 64 Bytes - 8K Bytes 中 UDP 延迟时间(结果越低,性能越好)
从测试结果可见,MACVLAN 和 SR-IOV 这样的 Underlay 网络插件的吞吐量最高、延迟最低,仅从网络性能上看它们肯定是最优秀的,相对而言 Flannel-VXLAN 这样的 Overlay 网络插件,其吞吐量只有 MACVLAN 和 SR-IOV 的 70%左右,延迟更是高了两至三倍之多。Overlay 为了易用性、灵活性所付出的代价还是不可忽视的,但是对于那些不以网络 I/O 为性能瓶颈的系统而言,这样的代价并非一定不可接受,就看你心中对通用性与性能是如何权衡取舍。
功能方面的问题就比较简单了,完全取决于你的需求是否能够满足。对于容器编排系统来说,网络并非孤立的功能模块,只提供网络通信就可以的,譬如 Kubernetes 的 NetworkPolicy 资源是用于描述“两个 Pod 之间是否可以访问”这类 ACL 策略。但它不属于 CNI 的范畴,因此不是每个 CNI 插件都会支持 NetworkPolicy 的声明,如果有这方面的需求,就应该放弃 Flannel,去选择 Calico、Weave 等插件。类似的其他功能上的选择的例子还有很多,笔者不再一一列举。
持久化存储
容器是镜像的运行时实例,为了保证镜像能够重复地产生出具备一致性的运行时实例,必须要求镜像本身是持久而稳定的,这决定了在容器中发生的一切数据变动操作都不能真正写入到镜像当中,否则必然会破坏镜像稳定不变的性质。为此,容器中的数据修改操作,大多是基于写入时复制(Copy-on-Write)策略来实现的,容器会利用叠加式文件系统(OverlayFS)的特性,在用户意图对镜像进行修改时,自动将变更的内容写入到独立区域,再与原有数据叠加到一起,使其外观上看来像是“覆盖”了原有内容。这种改动通常都是临时的,一旦容器终止运行,这些存储于独立区域中的变动信息也将被一并移除,不复存在。由此可见,如果不去进行额外的处理,容器默认是不具备持久化存储能力的。
而另一方面,容器作为信息系统的运行载体,必定会产生出有价值的、应该被持久保存的信息,譬如扮演数据库角色的容器,大概没有什么系统能够接受数据库像缓存服务一样重启之后会丢失全部数据;多个容器之间也经常需要通过共享存储来实现某些交互操作,譬如以前曾经举过的例子,Nginx 容器产生日志、Filebeat 容器收集日志,两者就需要共享同一块日志存储区域才能协同工作。正因为镜像的稳定性与生产数据持久性存在矛盾,由此才产生了本章的主题:如何实现容器的持久化存储。
Kubernetes 存储设计
Kubernetes 在规划持久化存储能力的时候,依然遵循着它的一贯设计哲学,用户负责以资源和声明式 API 来描述自己的意图,Kubernetes 负责根据用户意图来完成具体的操作。不过,就算仅仅是描述清楚用户的存储意图也并不是一件容易的事,相比起 Kubernetes 提供其他能力的资源,其内置的存储资源显得格外地复杂,甚至可以说是有些烦琐的。如果你是 Kubernetes 的拥趸,无法认同笔者对 Kubernetes 的批评,那不妨来看一看下列围绕着“Volume”所衍生出的概念,它们仅仅是 Kubernetes 存储相关的概念的一个子集而已,请你思考一下这些概念是否全都是必须的,是否还有整合的空间,是否有化繁为简的可能性:
- 概念:Volume、PersistentVolume、PersistentVolumeClaim、Provisioner、StorageClass、Volume Snapshot、Volume Snapshot Class、Ephemeral Volumes、FlexVolume Driver、Container Storage Interface、CSI Volume Cloning、Volume Limits、Volume Mode、Access Modes、Storage Capacity……
- 操作:Mount、Bind、Use、Provision、Claim、Reclaim、Reserve、Expand、Clone、Schedule、Reschedule……
诚然,Kubernetes 摆弄出如此多关于存储的术语概念,最重要的原因是存储技术本来就门类众多,为了尽可能多地兼容各种存储,Kubernetes 不得不预置了很多 In-Tree(意思是在 Kubernetes 的代码树里)插件来对接,让用户根据自己业务按需选择。同时,为了兼容那些不在预置范围内的需求场景,支持用户使用 FlexVolume 或者 CSI 来定制 Out-of-Tree(意思是在 Kubernetes 的代码树之外)的插件,实现更加丰富多样的存储能力。表 13-1 列出了部分 Kubernetes 目前提供的存储与扩展:
表 13-1:Kubernetes 目前提供的存储
| Temp | Ephemeral(Local) | Persistent(Network) | Extension |
|---|---|---|---|
| EmptyDir | HostPath GitRepo Local Secret ConfigMap DownwardAPI | AWS Elastic Block Store GCE Persistent Disk Azure Data Disk Azure File Storage vSphere CephFS and RBD GlusterFS iSCSI Cinder Dell EMC ScaleIO …… | FlexVolume CSI |
迫使 Kubernetes 存储设计成如此复杂,还有另外一个非技术层面的原因:Kubernetes 是一个工业级的、面向生产应用的容器编排系统,这意味着即使发现某些已存在的功能有更好的实现方式,直到旧版本被淘汰出生产环境以前,原本已支持的功能都不允许突然间被移除或者替换掉,否则,如果生产系统一更新版本,已有的功能就出现异常,那对产品累积良好的信誉是相当不利的。
为了兼容而导致的烦琐,在一定程度上可以被谅解,但这样的设计的确令 Kubernetes 的学习曲线变得更加陡峭。Kubernetes 官方文档的主要作用是参考手册,它并不会告诉你 Kubernetes 中各种概念的演化历程、版本发布新功能的时间线、改动的缘由与背景等信息。Kubernetes 的文档系统只会以“平坦”的方式来陈述所有目前可用的功能,这有利于熟练的管理员快速查询到关键信息,却不利于初学者去理解 Kubernetes 的设计思想,由于难以理解那些概念和操作的本意,往往只能死记硬背,也很难分辨出它们应该如何被“更正确”的使用。介绍 Kubernetes 设计理念的职责,只能由Kubernetes 官方的 Blog这类定位超越了帮助手册的信息渠道,或者其他非官方资料去完成。本节,笔者会以 Volume 概念从操作系统到 Docker,再到 Kubernetes 的演进历程为主线,去梳理前面提及的那些概念与操作,以此帮助大家理解 Kubernetes 的存储设计。
Mount 和 Volume
Mount 和 Volume 都是来源自操作系统的常用术语,Mount 是动词,表示将某个外部存储挂载到系统中,Volume 是名词,表示物理存储的逻辑抽象,目的是为物理存储提供有弹性的分割方式。容器源于对操作系统层的虚拟化,为了满足容器内生成数据的外部存储需求,也很自然地会将 Mount 和 Volume 的概念延拓至容器中。我们去了解容器存储的发展,不妨就以 Docker 的 Mount 操作为起始点。
目前,Docker 内建支持了三种挂载类型,分别是 Bind(--mount type=bind)、Volume(--mount type=volume)和 tmpfs(--mount type=tmpfs),如图 13-1 所示。其中 tmpfs 用于在内存中读写临时数据,与本节主要讨论的对象持久化存储并不相符,所以后面我们只着重关注 Bind 和 Volume 两种挂载类型。
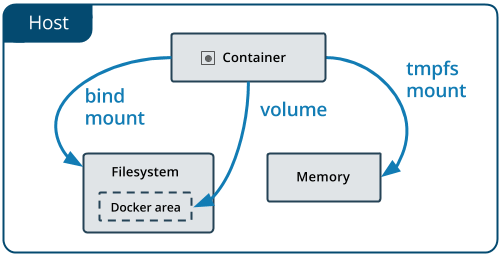
图 13-1 Docker 的三种挂载类型(图片来自Docker 官网文档)
Bind Mount 是 Docker 最早提供的(发布时就支持)挂载类型,作用是把宿主机的某个目录(或文件)挂载到容器的指定目录(或文件)下,譬如以下命令中参数-v表达的意思就是将外部的 HTML 文档挂到 Nginx 容器的默认网站根目录下:
docker run -v /icyfenix/html:/usr/share/nginx/html nginx:latest请注意,虽然命令中-v参数是--volume的缩写,但-v最初只是用来创建 Bind Mount 而不是创建 Volume Mount 的,这种迷惑的行为也并非 Docker 的本意,只是由于 Docker 刚发布时考虑得不够周全,随随便便就在参数中占用了“Volume”这个词,到后来真的需要扩展 Volume 的概念来支持 Volume Mount 时,前面的-v已经被用户广泛使用了,所以也就只得如此将就着继续用。从 Docker 17.06 版本开始,它在 Docker Swarm 中借用了--mount参数过来,这个参数默认创建的是 Volume Mount,可以通过明确的 type 子参数来指定另外两种挂载类型。上面命令可以等价于--mount版本如下形式:
docker run --mount type=bind,source=/icyfenix/html,destination=/usr/share/nginx/html nginx:latest从 Bind Mount 到 Volume Mount,实质是容器发展过程中对存储抽象能力提升的外在表现。从“Bind”这个名字,以及 Bind Mount 的实际功能可以合理地推测,Docker 最初认为“Volume”就只是一种“外部宿主机的磁盘存储到内部容器存储的映射关系”,但后来眉头一皱发现事情并没有那么简单:存储的位置并不局限只在外部宿主机、存储的介质并不局限只是物理磁盘、存储的管理也并不局限只有映射关系。
譬如,Bind Mount 只能让容器与本地宿主机之间建立了某个目录的映射,如果想要在不同宿主机上的容器共享同一份存储,就必须先把共享存储挂载到每一台宿主机操作系统的某个目录下,然后才能逐个挂载到容器内使用,这种跨宿主机共享存储的场景如图 13-2 所示。
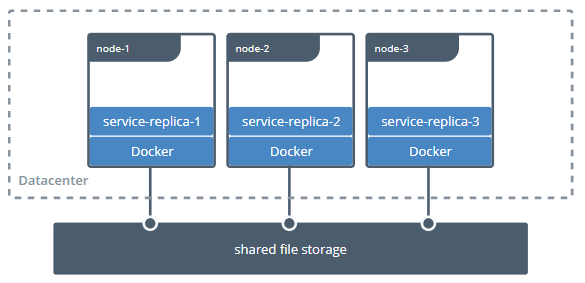
图 13-2 跨主机的共享存储需求(图片来自Docker 官网文档)
这种存储范围超越了宿主机的共享存储,配置过程却要涉及到大量与宿主机环境相关的操作,只能由管理员人工去完成,不仅烦琐,而且每台宿主机环境的差异导致还很难自动化。
又譬如即便只考虑单台宿主机的情况,基于可管理性的需求,Docker 也完全有支持 Volume Mount 的必要。Bind Mount 的设计里,Docker 只有容器的控制权,存放容器生产数据的主机目录是完全独立的,与 Docker 没有任何关系,既不受 Docker 保护,也不受 Docker 管理。数据很容易被其他进程访问到,甚至是被修改和删除。如果用户想对挂载的目录进行备份、迁移等管理运维操作,也只能在 Docker 之外靠管理员人工进行,这都增加了数据安全与操作意外的风险。因此,Docker 希望能有一种抽象的资源来代表在宿主机或网络中存储的区域,以便让 Docker 能管理这些资源,由此就很自然地联想到了操作系统里 Volume 的概念。
最后,提出 Volume 最核心的一个目的是为了提升 Docker 对不同存储介质的支撑能力,这同时也是为了减轻 Docker 本身的工作量。存储并不是仅有挂载在宿主机上的物理存储这一种介质,云计算时代,网络存储渐成数据中心的主流选择,不同的网络存储有各自的协议和交互接口,而且并非所有存储系统都适合先挂载到操作系统,然后再挂载到容器的,如果 Docker 想要越过操作系统去支持挂载某种存储系统,首先必须要知道该如何访问它,然后才能将容器中的读写操作自动转移到该位置。Docker 把解决如何访问存储的功能模块称为存储驱动(Storage Driver)。通过docker info命令,你能查看到当前 Docker 所支持的存储驱动。虽然 Docker 已经内置了市面上主流的 OverlayFS 驱动,譬如 Overlay、Overlay2、AUFS、BTRFS、ZFS,等等,但面对云计算的快速迭代,仅靠 Docker 自己来支持全部云计算厂商的存储系统是完全不现实的,为此,Docker 提出了与 Storage Driver 相对应的 Volume Driver(卷驱动)的概念。用户可以通过docker plugin install命令安装外部的卷驱动,并在创建 Volume 时指定一个与其存储系统相匹配的卷驱动,譬如希望数据存储在 AWS Elastic Block Store 上,就找一个 AWS EBS 的驱动,如果想存储在 Azure File Storage 上,也是找一个对应的 Azure File Storage 驱动即可。如果创建 Volume 时不指定卷驱动,那默认就是 local 类型,在 Volume 中存放的数据会存储在宿主机的/var/lib/docker/volumes/目录之中。
静态存储分配
现在我们把讨论主角转回容器编排系统上。Kubernetes 同样将操作系统和 Docker 的 Volume 概念延续了下来,并且对其进一步细化。Kubernetes 将 Volume 分为持久化的 PersistentVolume 和非持久化的普通 Volume 两类。为了不与前面定义的 Volume 这个概念产生混淆,后面特指 Kubernetes 中非持久化的 Volume 时,都会带着“普通”前缀。
普通 Volume 的设计目标不是为了持久地保存数据,而是为同一个 Pod 中多个容器提供可共享的存储资源,因此 Volume 具有十分明确的生命周期——与挂载它的 Pod 相同的生命周期,这意味着尽管普通 Volume 不具备持久化的存储能力,但至少比 Pod 中运行的任何容器的存活期都更长,Pod 中不同的容器能共享相同的普通 Volume,当容器重新启动时,普通 Volume 中的数据也会能够得到保留。当然,一旦整个 Pod 被销毁,普通 Volume 也将不复存在,数据在逻辑上也会被销毁掉,至于实质上会否会真正删除数据,就取决于存储驱动具体是如何实现 Unmount、Detach、Delete 接口的,由于本节的主题为“持久化存储”,所以无持久化能力的普通 Volume 就不再展开了。
从操作系统里传承下来的 Volume 概念,在 Docker 和 Kubernetes 中继续按照一致的逻辑延伸拓展,只不过 Kubernetes 为将其与普通 Volume 区别开来,专门取了 PersistentVolume 这个名字,你可以从从图 13-3 中直观地看出普通 Volume、PersistentVolume 和 Pod 之间的关系差异。
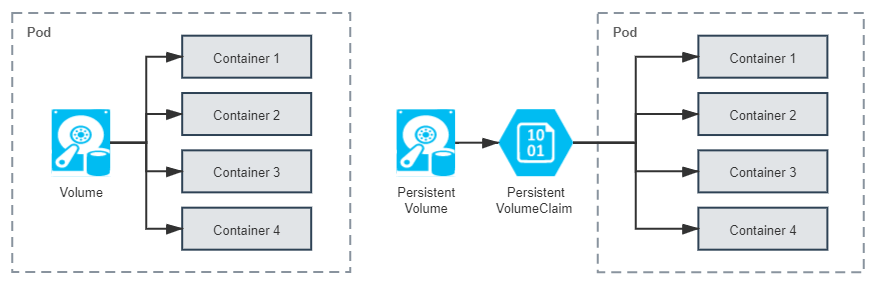
图 13-3 普通 Volume 与 PersistentVolume 的差别
从“Persistent”这个单词就能顾名思义,PersistentVolume 是指能够将数据进行持久化存储的一种资源对象,它可以独立于 Pod 存在,生命周期与 Pod 无关,因此也决定了 PersistentVolume 不应该依附于任何一个宿主机节点,否则必然会对 Pod 调度产生干扰限制。前面表 13-1 中“Persistent”一列里看到的都是网络存储便是很好的印证。
额外知识:Local PersistentVolume
对于部署在云端数据中心的系统,通过网络访问同一个可用区中的远程存储,速度是完全可以接受的。但对于私有部署的系统,基于性能考虑,使用本地存储往往会更为常见。
考虑到这样的实际需求,从 1.10 版起,Kubernetes 开始支持Local PersistentVolume,这是一种将一整块本地磁盘作为 PersistentVolume 供容器使用的专用方案。“专用方案”就是字面意思,它并不适用于全部应用,Local PersistentVolume 只是针对以磁盘 I/O 为瓶颈的特定场景的解决方案,副作用十分明显:由于不能保证这种本地磁盘在每个节点中都一定存在,所以 Kubernetes 在调度时就必须考虑到 PersistentVolume 分布情况,只能把使用了 Local PersistentVolume 的 Pod 调度到有这种 PersistentVolume 的节点上。调度器中专门有个Volume Binding Mode模式来支持这项处理,尽管如此,一旦使用了 Local PersistentVolume,无疑是会限制 Pod 的可调度范围。
将 PersistentVolume 与 Pod 分离后,便需要专门考虑 PersistentVolume 该如何被 Pod 所引用的问题。原本在 Pod 中引用其他资源是常有的事,要么直接通过资源名称直接引用,要么通过标签选择器(Selectors)间接引用。但是类似的方法在这里却都不太妥当,至于原因,请你想一下“Pod 该使用何种存储”这件事情,应该是系统管理员(运维人员)说的算,还是由用户(开发人员)说的算?最合理的答案是他们一起说的才算,因为只有开发能准确评估 Pod 运行需要消耗多大的存储空间,只有运维能清楚知道当前系统可以使用的存储设备状况,为了让他们得以各自提供自己擅长的信息,Kubernetes 又额外设计出了 PersistentVolumeClaim 资源。Kubernetes 官方给出的概念定义也特别强调了 PersistentVolume 是由管理员(运维人员)负责维护的,用户(开发人员)通过 PersistentVolumeClaim 来匹配到合乎需求的 PersistentVolume。
PersistentVolume & PersistentVolumeClaim
A PersistentVolume (PV) is a piece of storage in the cluster that has been provisioned by an administrator.
A PersistentVolumeClaim (PVC) is a request for storage by a user.PersistentVolume 是由管理员负责提供的集群存储。
PersistentVolumeClaim 是由用户负责提供的存储请求。—— Kubernetes Reference Documentation,Persistent Volumes
PersistentVolume 是 Volume 这个抽象概念的具象化表现,通俗地说就它是已经被管理员分配好的具体的存储,这里的“具体”是指有明确的存储系统地址,有明确的容量、访问模式、存储位置等信息;而 PersistentVolumeClaim 则是 Pod 对其所需存储能力的声明,通俗地说就是满足这个 Pod 正常运行要满足怎样的条件,譬如要消耗多大的存储空间、要支持怎样的访问方式。因此两者并不是谁引用谁的固定关系,而是根据实际情况动态匹配的,两者配合工作的具体过程如下。
管理员准备好要使用的存储系统,它应是某种网络文件系统(NFS)或者云储存系统,一般来说应该具备跨主机共享的能力。
管理员根据存储系统的实际情况,手工预先分配好若干个 PersistentVolume,并定义好每个 PersistentVolume 可以提供的具体能力。譬如以下例子所示:
apiVersion: v1 kind: PersistentVolume metadata: name: nginx-html spec: capacity: storage: 5Gi # 最大容量为5GB accessModes: - ReadWriteOnce # 访问模式为RWO persistentVolumeReclaimPolicy: Retain # 回收策略是Retain nfs: # 存储驱动是NFS path: /html server: 172.17.0.2以上 YAML 中定义的存储能力具体为:
- 存储的最大容量是 5GB。
- 存储的访问模式是“只能被一个节点读写挂载”(ReadWriteOnce,RWO),另外两种可选的访问模式是“可以被多个节点以只读方式挂载”(ReadOnlyMany,ROX)和“可以被多个节点读写挂载”(ReadWriteMany,RWX)。
- 存储的回收策略是 Retain,即在 Pod 被销毁时并不会删除数据。另外两种可选的回收策略分别是 Recycle ,即在 Pod 被销毁时,由 Kubernetes 自动执行
rm -rf /volume/*这样的命令来自动删除资料;以及 Delete,它让 Kubernetes 自动调用 AWS EBS、GCE PersistentDisk、OpenStack Cinder 这些云存储的删除指令。 - 存储驱动是 NFS,其他常见的存储驱动还有 AWS EBS、GCE PD、iSCSI、RBD(Ceph Block Device)、GlusterFS、HostPath,等等。
用户根据业务系统的实际情况,创建 PersistentVolumeClaim,声明 Pod 运行所需的存储能力。譬如以下例子所示:
kind: PersistentVolumeClaim apiVersion: v1 metadata: name: nginx-html-claim spec: accessModes: - ReadWriteOnce # 支持RWO访问模式 resources: requests: storage: 5Gi # 最小容量5GB以上 YAML 中声明了要求容量不得小于 5GB,必须支持 RWO 的访问模式。
Kubernetes 创建 Pod 的过程中,会根据系统中 PersistentVolume 与 PersistentVolumeClaim 的供需关系对两者进行撮合,如果系统中存在满足 PersistentVolumeClaim 声明中要求能力的 PersistentVolume 则撮合成功,将它们绑定。如果撮合不成功,Pod 就不会被继续创建,直至系统中出现新的或让出空闲的 PersistentVolume 资源。
以上几步都顺利完成的话,意味着 Pod 的存储需求得到满足,继续 Pod 的创建过程,整个过程如图 13-4 所示。
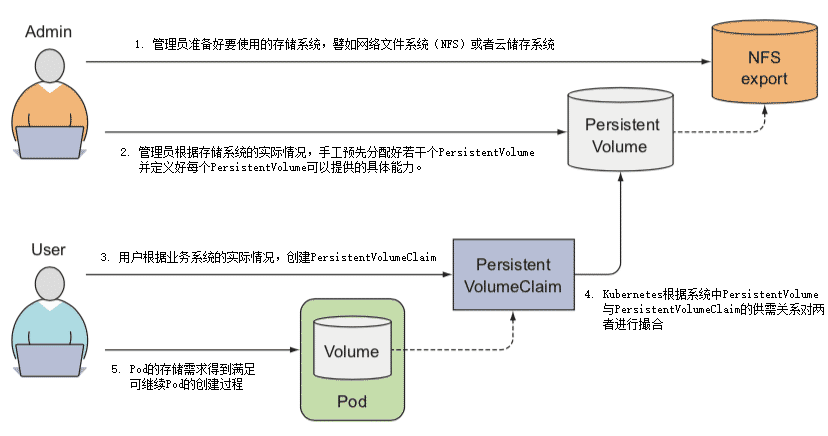
图 13-4 PersistentVolumeClaim 与 PersistentVolume 运作过程(图片来自《Kubernetes in Action》)
Kubernetes 对 PersistentVolumeClaim 与 PersistentVolume 撮合的结果是产生一对一的绑定关系,“一对一”的意思是 PersistentVolume 一旦绑定在某个 PersistentVolumeClaim 上,直到释放以前都会被这个 PersistentVolumeClaim 所独占,不能再与其他 PersistentVolumeClaim 进行绑定。这意味着即使 PersistentVolumeClaim 申请的存储空间比 PersistentVolume 能够提供的要少,依然要求整个存储空间都为该 PersistentVolumeClaim 所用,这有可能会造成资源的浪费。譬如,某个 PersistentVolumeClaim 要求 3GB 的存储容量,当前 Kubernetes 手上只剩下一个 5GB 的 PersistentVolume 了,此时 Kubernetes 只好将这个 PersistentVolume 与申请资源的 PersistentVolumeClaim 进行绑定,平白浪费了 2GB 空间。假设后续有另一个 PersistentVolumeClaim 申请 2GB 的存储空间,那它也只能等待管理员分配新的 PersistentVolume,或者有其他 PersistentVolume 被回收之后才被能成功分配。
动态存储分配
对于中小规模的 Kubernetes 集群,PersistentVolume 已经能够满足有状态应用的存储需求,PersistentVolume 依靠人工介入来分配空间的设计算是简单直观,却算不上是先进,一旦应用规模增大,PersistentVolume 很难被自动化的问题就会突显出来。这是由于 Pod 创建过程中去挂载某个 Volume,要求该 Volume 必须是真实存在的,否则 Pod 启动可能依赖的数据(如一些配置、数据、外部资源等)都将无从读取。Kubernetes 有能力随着流量压力和硬件资源状况,自动扩缩 Pod 的数量,但是当 Kubernetes 自动扩展出一个新的 Pod 后,并没有办法让 Pod 去自动挂载一个还未被分配资源的 PersistentVolume。想解决这个问题,要么允许多个不同的 Pod 都共用相同的 PersistentVolumeClaim,这种方案确实只靠 PersistentVolume 就能解决,却损失了隔离性,难以通用;要么就要求每个 Pod 用到的 PersistentVolume 都是已经被预先建立并分配好的,这种方案靠管理员提前手工分配好大量的存储也可以实现,却损失了自动化能力。
无论哪种情况,都难以符合 Kubernetes 工业级编排系统的产品定位,对于大型集群,面对成百上千,乃至成千上万的 Pod,靠管理员手工分配存储肯定是捉襟见肘疲于应付的。在 2017 年 Kubernetes 发布 1.6 版本后,终于提供了今天被称为动态存储分配(Dynamic Provisioning)的解决方案,让系统管理员摆脱了人工分配的 PersistentVolume 的窘境,与之相对,人们把此前的分配方式称为静态存储分配(Static Provisioning)。
所谓的动态存储分配方案,是指在用户声明存储能力的需求时,不是期望通过 Kubernetes 撮合来获得一个管理员人工预置的 PersistentVolume,而是由特定的资源分配器(Provisioner)自动地在存储资源池或者云存储系统中分配符合用户存储需要的 PersistentVolume,然后挂载到 Pod 中使用,完成这项工作的资源被命名为 StorageClass,它的具体工作过程如下:
管理员根据储系统的实际情况,先准备好对应的 Provisioner。Kubernetes 官方已经提供了一系列预置的 In-Tree Provisioner,放置在
kubernetes.io的 API 组之下。其中部分 Provisioner 已经有了官方的 CSI 驱动,譬如 vSphere 的 Kubernetes 自带驱动为kubernetes.io/vsphere-volume,VMware 的官方驱动为csi.vsphere.vmware.com。管理员不再是手工去分配 PersistentVolume,而是根据存储去配置 StorageClass。Pod 是可以动态扩缩的,而存储则是相对固定的,哪怕使用的是具有扩展能力的云存储,也会将它们视为存储容量、IOPS 等参数可变的固定存储来看待,譬如你可以将来自不同云存储提供商、不同性能、支持不同访问模式的存储配置为各种类型的 StorageClass,这也是它名字中“Class”(类型)的由来,譬如以下例子所示:
apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: standard provisioner: kubernetes.io/aws-ebs #AWS EBS的Provisioner parameters: type: gp2 reclaimPolicy: Retain用户依然通过 PersistentVolumeClaim 来声明所需的存储,但是应在声明中明确指出该由哪个 StorageClass 来代替 Kubernetes 处理该 PersistentVolumeClaim 的请求,譬如以下例子所示:
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: standard-claim spec: accessModes: - ReadWriteOnce storageClassName: standard #明确指出该由哪个StorageClass来处理该PersistentVolumeClaim的请求 resource: requests: storage: 5Gi如果 PersistentVolumeClaim 中要求的 StorageClass 及它用到的 Provisioner 均是可用的话,那这个 StorageClass 就会接管掉原本由 Kubernetes 撮合 PersistentVolume 与 PersistentVolumeClaim 的操作,按照 PersistentVolumeClaim 中声明的存储需求,自动产生出满足该需求的 PersistentVolume 描述信息,并发送给 Provisioner 处理。
Provisioner 接收到 StorageClass 发来的创建 PersistentVolume 请求后,会操作其背后存储系统去分配空间,如果分配成功,就生成并返回符合要求的 PersistentVolume 给 Pod 使用。
以上几步都顺利完成的话,意味着 Pod 的存储需求得到满足,继续 Pod 的创建过程,整个过程如图 13-5 所示。
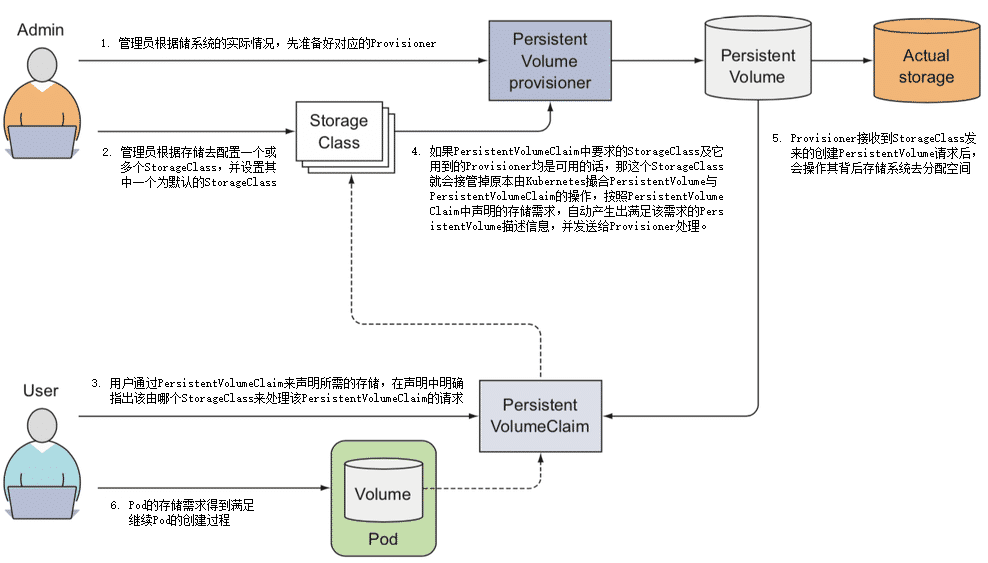
图 13-5 StorageClass 运作过程(图片来自《Kubernetes in Action》)
Dynamic Provisioning 与 Static Provisioning 并不是各有用途的互补设计,而是对同一个问题先后出现的两种解决方案。你完全可以只用 Dynamic Provisioning 来实现所有的 Static Provisioning 能够实现的存储需求,包括那些不需要动态分配的场景,甚至之前例子里使用 HostPath 在本地静态分配存储,都可以指定no-provisioner作为 Provisioner 的 StorageClass,以 Local Persistent Volume 来代替,譬如以下例子所示:
apiVersion: storage.k8s.io/v1
kind: StorageClass
metadata:
name: local-storage
provisioner: kubernetes.io/no-provisioner
volumeBindingMode: WaitForFirstConsumer使用 Dynamic Provisioning 来分配存储无疑是更合理的设计,不仅省去了管理员的人工操作的中间层,也不再需要将 PersistentVolume 这样的概念暴露给最终用户,因为 Dynamic Provisioning 里的 PersistentVolume 只是处理过程的中间产物,用户不再需要接触和理解它,只需要知道由 PersistentVolumeClaim 去描述存储需求,由 StorageClass 去满足存储需求即可。只描述意图而不关心中间具体的处理过程是声明式编程的精髓,也是流程自动化的必要基础。
由 Dynamic Provisioning 来分配存储还能获得更高的可管理性,譬如前面提到的回收策略,当希望 PersistentVolume 跟随 Pod 一同被销毁时,以前经常会配置回收策略为 Recycle 来回收空间,即让系统自动执行rm -rf /volume/*命令,这种方式往往过于粗暴,遇到更精细的管理需求,譬如“删除到回收站”或者“敏感信息粉碎式彻底删除”这样的功能实现起来就很麻烦。而 Dynamic Provisioning 中由于有 Provisioner 的存在,如何创建、如何回收都是由 Provisioner 的代码所管理的,这就带来了更高的灵活性。现在 Kubernetes 官方已经明确建议废弃掉 Recycle 策略,如有这类需求就应改由 Dynamic Provisioning 去实现了。
Static Provisioning 的主要使用场景已局限于管理员能够手工管理存储的小型集群,它符合很多小型系统,尤其是私有化部署系统的现状,但并不符合当今运维自动化所提倡的思路。Static Provisioning 的存在,某种意义上也可以视为是对历史的一种兼容,在可见的将来,Kubernetes 肯定仍会把 Static Provisioning 作为用户分配存储的一种主要方案供用户选用。
容器存储与生态
容器存储具有很强的多样性,如何对接后端实际的存储系统,并且完全发挥出它所有的性能与功能并不是 Kubernetes 团队所擅长的工作,这件事情只有存储提供商自己才能做到最好。由此可以理解容器编排系统为何会有很强烈的意愿想把存储功能独立到外部去实现,在前面的讲解中,笔者已经反复提到过多次 In-Tree、Out-of-Tree 插件,这节,我们会以存储插件的接口与实现为中心,去解析 Kubernetes 的容器存储生态。
Kubernetes 存储架构
正式开始讲解 Kubernetes 的 In-Tree、Out-of-Tree 存储插件前,我们有必要先去了解一点 Kubernetes 存储架构的知识,大体上弄清一个真实的存储系统是如何接入到新创建的 Pod 中,成为可以读写访问的 Volume 的;以及当 Pod 被销毁时,Volume 如何被回收,回归到存储系统之中的。Kubernetes 参考了传统操作系统接入或移除新存储设备做法,把接入或移除外部存储这件事情分解为以下三种操作:
- 首先,决定应准备(Provision)何种存储,Provision 可类比为给操作系统扩容而购买了新的存储设备。这步确定了接入存储的来源、容量、性能以及其他技术参数,它的逆操作是移除(Delete)存储。
- 然后,将准备好的存储附加(Attach)到系统中,Attach 可类比为将存储设备接入操作系统,此时尽管设备还不能使用,但你已经可以用操作系统的
fdisk -l命令查看到设备。这步确定了存储的设备名称、驱动方式等面向系统一侧的信息,它的逆操作是分离(Detach)存储设备。 - 最后,将附加好的存储挂载(Mount)到系统中,Mount 可类比为将设备挂载到系统的指定位置,也就是操作系统中
mount命令的作用。这步确定了存储的访问目录、文件系统格式等面向应用一侧的信息,它的逆操作是卸载(Unmount)存储设备。
以上提到的 Provision、Delete、Attach、Detach、Mount、Unmount 六种操作,并不是直接由 Kubernetes 来实现,实际行为均是在存储插件中完成的,它们会分别被 Kubernetes 通过两个控制器及一个管理器来进行调用,这些控制器、管理器的作用分别是:
- PV 控制器(PersistentVolume Controller):“以容器构建系统”一节中介绍过,Kubernetes 里所有的控制器都遵循着相同的工作模式——让实际状态尽可能接近期望状态。PV 控制器的期望状态有两个,分别是“所有未绑定的 PersistentVolume 都能处于可用状态”以及“所有处于等待状态的 PersistentVolumeClaim 都能配对到与之绑定的 PersistentVolume”,它内部也有两个相对独立的核心逻辑(ClaimWorker 和 VolumeWorker)来分别跟踪这两种期望状态,可以简单地理解为 PV 控制器实现了 PersistentVolume 和 PersistentVolumeClaim 的生命周期管理职能,在这个过程中,会根据需要调用存储驱动插件的 Provision/Delete 操作。
- AD 控制器(Attach/Detach Controller):AD 控制器的期望状态是“所有被调度到准备新创建 Pod 的节点,都附加好了要使用的存储;当 Pod 被销毁后,原本运行 Pod 的节点都分离了不再被使用的存储”,如果实际状态不符合该期望,会根据需要调用存储驱动插件的 Attach/Detach 操作。
- Volume 管理器(Volume Manager):Volume 管理器实际上是 kubelet 的一部分,是 kubelet 中众多管理器的其中一个,它主要是用来支持本节点中 Volume 执行 Attach/Detach/Mount/Unmount 操作。你可能注意到这里不仅有 Mount/Unmount 操作,也出现了 Attach/Detach 操作,这是历史原因导致的,由于最初版本的 Kubernetes 中并没有 AD 控制器,Attach/Detach 的职责也在 kubelet 中完成。现在 kubelet 默认情况下已经不再会执行 Attach/Detach 了,但有少量旧程序已经依赖了由 kubelet 来实现 Attach/Detach 的内部逻辑,所以 kubelet 不得不设计一个
--enable-controller-attach-detach参数,如果将其设置为false的话就会重新回到旧的兼容模式上,由 kubelet 代替 AD 控制器来完成 Attach/Detach。
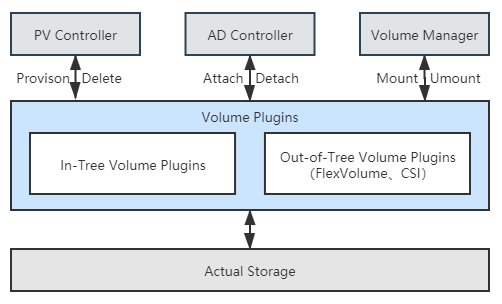
图 13-6 Kubernetes 存储架构
后端的真实存储依次经过 Provision、Attach、Mount 操作之后,就形成了可以在容器中挂载的 Volume,当存储的生命周期完结,依次经过 Unmount、Detach、Delete 操作之后,Volume 便能够被存储系统回收。对于某些存储来说,其中有一些操作可能是无效的,譬如 NFS,实际使用并不需要 Attach,此时存储插件只需将 Attach 实现为空操作即可。
FlexVolume 与 CSI
Kubernetes 目前同时支持FlexVolume与CSI(Container Storage Interface)两套独立的存储扩展机制。FlexVolume 是 Kubernetes 很早期版本(1.2 版开始提供,1.8 版达到 GA 状态)就开始支持的扩展机制,它是只针对 Kubernetes 的私有的存储扩展,目前已经处于冻结状态,可以正常使用但不再发展新功能了。CSI 则是从 Kubernetes 1.9 开始加入(1.13 版本达到 GA 状态)的扩展机制,如同之前介绍过的 CRI 和 CNI 那样,CSI 是公开的技术规范,任何容器运行时、容器编排引擎只要愿意支持,都可以使用 CSI 规范去扩展自己的存储能力,这是目前 Kubernetes 重点发展的扩展机制。
由于是专门为 Kubernetes 量身订造的,所以 FlexVolume 的实现逻辑与上一节介绍的 Kubernetes 存储架构高度一致。FlexVolume 驱动其实就是一个实现了 Attach、Detach、Mount、Unmount 操作的可执行文件(甚至可以仅仅是个 Shell 脚本)而已,该可执行文件应该存放在集群每个节点的/usr/libexec/kubernetes/kubelet-plugins/volume/exec目录里,其工作过程也就是当 AD 控制器和 Volume 管理器需要进行 Attach、Detach、Mount、Unmount 操作时自动调用它的对应方法接口,如图 13-7 所示。
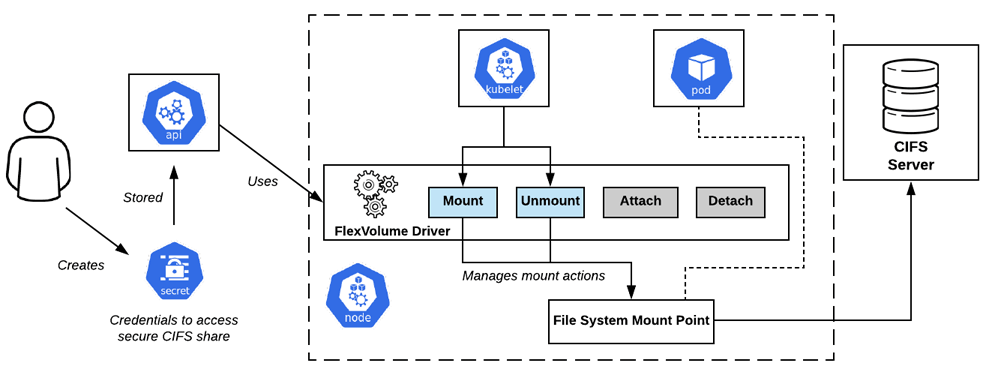
图 13-7 FlexVolume Driver 工作过程(图片来源)
如果仅仅考虑支持最基本的 Static Provisioning,那实现一个 FlexVolume Driver 确实是非常简单的。然而也是由于 FlexVolume 过于简单了,导致它应用起来会有诸多不便之处,譬如:
- FlexVolume 并不是全功能的驱动:FlexVolume 不包含 Provision 和 Delete 操作,也就无法直接用于 Dynamic Provisioning,除非你愿意再单独编写一个 External Provisioner。
- FlexVolume 部署维护都相对繁琐:FlexVolume 是独立于 Kubernetes 的可执行文件,当集群节点增加时,需要由管理员在新节点上部署 FlexVolume Driver,有经验的系统管理员通常会专门编写一个 DaemonSet 来代替人工来完成这项任务。
- FlexVolume 实现复杂交互也相对繁琐:FlexVolume 的每一次操作,都是对插件可执行文件的一次独立调用,这种插件实现方式在各种操作需要相互通讯时会很别扭。譬如你希望在执行 Mount 操作的时候,生成一些额外的状态信息,这些信息在后面执行 Unmount 操作时去使用,那就只能把信息记录在某个约定好的临时文件中,对于一个面向生产的容器编排系统,这样的做法实在是过于简陋了。
相比起 FlexVolume 的种种不足,CSI 可算是一个十分完善的存储扩展规范,这里“十分完善”可不是客套话,根据 GitHub 的自动代码行统计,FlexVolume 的规范文档仅有 155 行,而 CSI 则长达 2704 行。总体上看,CSI 规范可以分为需要容器系统去实现的组件,以及需要存储提供商去实现的组件两大部分。前者包括了存储整体架构、Volume 的生命周期模型、驱动注册、Volume 创建、挂载、扩容、快照、度量等内容,这些 Kubernetes 都已经完整地实现了,大体上包括以下几个组件:
- Driver Register:负责注册第三方插件,CSI 0.3 版本之后已经处于 Deprecated 状态,将会被Node Driver Register所取代。
- External Provisioner:调用第三方插件的接口来完成数据卷的创建与删除功能。
- External Attacher:调用第三方插件的接口来完成数据卷的挂载和操作。
- External Resizer:调用第三方插件的接口来完成数据卷的扩容操作。
- External Snapshotter:调用第三方插件的接口来完成快照的创建和删除。
- External Health Monitor:调用第三方插件的接口来提供度量监控数据。
需要存储提供商去实现的组件才是 CSI 的主体部分,即前文中多次提到的“第三方插件”。这部分着重定义了外部存储挂载到容器过程中所涉及操作的抽象接口和具体的通讯方式,主要包括以下三个 gRPC 接口:
- CSI Identity 接口:用于描述插件的基本信息,譬如插件版本号、插件所支持的 CSI 规范版本、插件是否支持存储卷创建、删除功能、是否支持存储卷挂载功能,等等。此外 Identity 接口还用于检查插件的健康状态,开发者可以通过实现 Probe 接口对外提供存储的健康度量信息。
- CSI Controller 接口:用于从存储系统的角度对存储资源进行管理,譬如准备和移除存储(Provision、Delete 操作)、附加与分离存储(Attach、Detach 操作)、对存储进行快照,等等。存储插件并不一定要实现这个接口的所有方法,对于存储本身就不支持的功能,可以在 CSI Identity 接口中声明为不提供。
- CSI Node 接口:用于从集群节点的角度对存储资源进行操作,譬如存储卷的分区和格式化、将存储卷挂载到指定目录上、或者将存储卷从指定目录上卸载,等等。
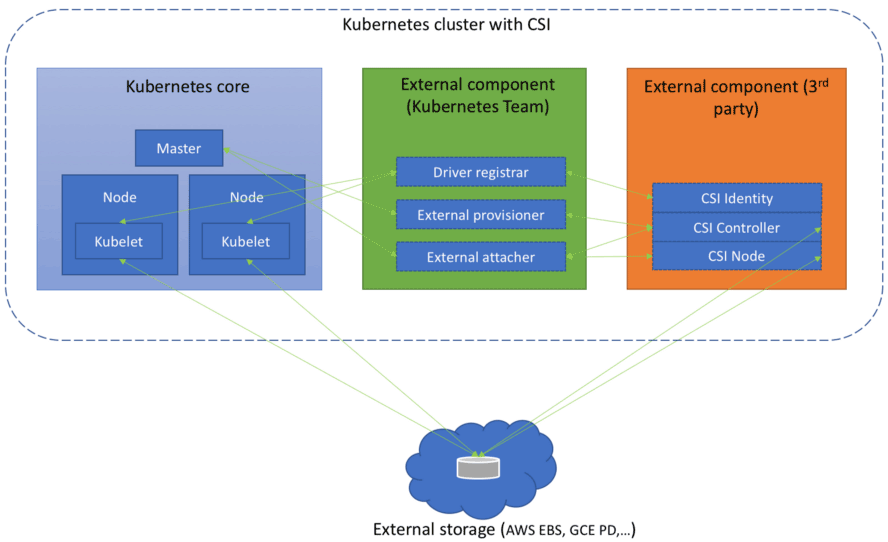
图 13-8 CSI 组件架构(图片来源)
与 FlexVolume 以单独的可执行程序的存在形式不同,CSI 插件本身便是由一组标准的 Kubernetes 资源所构成,CSI Controller 接口是一个以 StatefulSet 方式部署的 gRPC 服务,CSI Node 接口则是基于 DaemonSet 方式部署的 gRPC 服务。这意味着虽然 CSI 实现起来要比 FlexVolume 复杂得多,但是却很容易安装——如同安装 CNI 插件及其它应用那样,直接载入 Manifest 文件即可,也不会遇到 FlexVolume 那样需要人工运维,或者自己编写 DaemonSet 来维护集群节点变更的问题。此外,通过 gRPC 协议传递参数比通过命令行参数传递参数更加严谨,灵活和可靠,最起码不会出现多个接口之间协作只能写临时文件这样的尴尬状况。
从 In-Tree 到 Out-of-Tree
Kubernetes 原本曾内置了相当多的 In-Tree 的存储驱动,时间上甚至还早于 Docker 宣布支持卷驱动功能,这种策略使得 Kubernetes 能够在云存储提供商发布官方驱动之前就将其纳入到支持范围中,同时减轻了管理员维护的工作量,为它在诞生初期快速占领市场做出了一定的贡献。但是,这种策略也让 Kubernetes 丧失了随时添加或修改存储驱动的灵活性,只能在更新大版本时才能加入或者修改驱动,导致云存储提供商被迫要与 Kubernetes 的发版节奏保持一致。此外,还涉及到第三方存储代码混杂在 Kubernetes 二进制文件中可能引起的可靠性及安全性问题。因此,当 Kubernetes 成为市场主流以后——准确的时间点是从 1.14 版本开始,Kubernetes 启动了 In-Tree 存储驱动的 CSI 外置迁移工作,按照计划,在 1.21 到 1.22 版本(大约在 2021 年中期)时,Kubernetes 中主要的存储驱动,如 AWS EBS、GCE PD、vSphere 等都会迁移至符合 CSI 规范的 Out-of-Tree 实现,不再提供 In-Tree 的支持。这种做法在设计上无疑是正确的,然而,这又面临了此前提过的该如何兼容旧功能的策略问题,譬如下面 YAML 定义了一个 Pod:
apiVersion: v1
kind: Pod
metadata:
name: nginx-pod-example
spec:
containers:
- name: nginx
image: nginx:latest
volumeMounts:
- name: html-pages-volume
mountPath: /usr/share/nginx/html
- name: config-volume
mountPath: /etc/nginx
volumes:
- name: html-pages-volume
hostPath: # 来自本地的存储
path: /srv/nginx/html
type: Directory
- name: config-volume
awsElasticBlockStore: # 来自AWS ESB的存储
volumeID: vol-0b39e0b08745caef4
fsType: ext4其中用到了类型为 hostPath 的 Volume,这相当于 Docker 中驱动类型为 local 的 Volume,不需要专门的驱动;而类型为 awsElasticBlockStore 的 Volume,从名字上就能看出是指存储驱动为 AWS EBS 的 Volume,当 CSI 迁移完成,awsElasticBlockStore 从 In-Tree 卷驱动中移除掉之后,它就应该按照 CSI 的写法改写成如下形式:
- name: config-volume
csi:
driver: ebs.csi.aws.com
volumeAttributes:
- volumeID: vol-0b39e0b08745caef4
- fsType: ext4这样的要求有悖于升级版本不应影响还在大范围使用的已有功能这条原则,所以 Kubernetes 1.17 中又提出了称为CSIMigration的解决方案,让 Out-of-Tree 的驱动能够自动伪装成 In-Tree 的接口来提供服务。 笔者专门花这两段来介绍 Volume 的 CSI 迁移,倒不是由于它算是多么重要的特性,而是这种兼容性设计本身就是 Kubernetes 设计理念的一个缩影,在 Kubernetes 的代码与功能中随处可见。好的设计需要权衡多个方面的利益,很多时候都得顾及现实的影响,要求设计向现实妥协,而不能仅仅考虑理论最优的方案。
容器插件生态
现在几乎所有云计算厂商都支持自家的容器通过 CSI 规范去接入外部存储,能够应用于 CSI 与 FlexVolume 的存储插件更是多达数十上百款,其中部分如下图所示,已经算是形成了初步的生态环境。限于篇幅,笔者不打算去谈论各种 CSI 存储插件的细节,这节会采取与 CNI 网络插件类似的讲述方式,以不同的存储类型为线索,介绍其中有代表性的实现。
图 13-9 部分容器存储提供商(图片来源)
目前出现过的存储系统和设备均可以划分到块存储、文件存储和对象存储这三种存储类型之中,划分的根本依据其实并非各种存储是如何储存数据的——那完全是存储系统私有的事情,更合理的划分依据是各种存储提供何种形式的接口供外部访问数据,不同的外部访问接口将反过来影响到存储的内部结构、性能与功能表现。虽然块存储、文件存储和对象存储可以彼此协同工作,但它们各自都有自己明确的擅长领域与优缺点,理解它们的工作原理,因地制宜地选择最适合的存储才能让系统达到最佳的工作状态。笔者按照它们出现的时间顺序分别介绍如下:
块存储:块存储是数据存储的最古老形式,数据都储存在固定长度的一个或多个块)(Block)中,想要读写访问数据,就必须使用与存储相匹配的协议(SCSI、SATA、SAS、FCP、FCoE、iSCSI……)来进行的。如果你是按顺序阅读本书内容的话,那笔者建议你类比上一章网络通讯中网络栈的数据流动过程,把存储设备中由块构成的信息流与网络设备中由数据包构成的信息流进行对比,事实上,像 iSCSI 这种协议真的就是建设在 TCP/IP 网络之上,上层以 SCSI 作为应用层协议对外提供服务的。
我们熟悉的硬盘就是最经典的块存储设备,以机械硬盘为例,一个块就是一个扇区,大小通常在 512 Bytes 至 4096 Bytes 之间。老式机械硬盘用柱面-磁头-扇区号(Cylinder-Head-Sector,CHS)组成的编号进行寻址,现代机械硬盘只用一个逻辑块编号(Logical Block Addressing,LBA)进行寻址。为了便于管理,硬盘通常会以多个块(这些块甚至可以来自不同的物理设备,譬如磁盘阵列的情况)来组成一个逻辑分区(Partition),将分区进行高级格式化之后就形成了卷(Volume),这便与上节“Kubernetes 存储设计”中提到“Volume 是源于操作系统的概念”衔接了起来。
块存储由于贴近底层硬件,没有文件、目录、访问权限等的牵绊,所以性能通常都是最优秀的,吞吐量高,延迟低。尽管人类作为信息系统的最终用户,并不会直接面对块来操作数据,多数应用程序也是基于文件而不是块来读写数据的,但是操作系统内核中许多地方就直接通过块设备(Block Device)接口来访问硬盘,一些追求 I/O 性能的软件,譬如高性能的数据库也会支持直接读写块设备以提升磁盘 I/O。块存储的特点是具有排它性,一旦块设备被某个客户端挂载后,其它客户端就无法再访问上面的数据了,因此,Kubernetes 中挂载的块存储大多访问模式都要求必须是 RWO(ReadWriteOnce)的。
文件存储:文件存储是最贴近人类用户的数据存储形式,数据存储在长度不固定的文件之中,用户可以针对文件进行新增、写入、追加、移动、复制、删除、重命名等各种操作,通常文件存储还会提供有文件查找、目录管理、权限控制等额外的高级功能。文件存储的访问不像块存储那样有五花八门的协议,POSIX接口(Portable Operating System Interface,POSIX)已经成为了事实标准,被各种商用的存储系统和操作系统共同支持。具体 POSIX 的文件操作接口笔者就不去举例罗列了,你不妨类比 Linux 下的各种文件管理命令来自行想象一下。
绝大多数传统的文件存储都是基于块存储之上去实现的,“文件”这个概念的出现是因为“块”对人类用户来说实在是过于难以使用、难以管理了。可以近似地认为文件是由块所组成的更高级存储单位。对于固定不会发生变动的文件,直接让每个文件连续占用若干个块,在文件头尾加入标志区分即可,磁带、CD-ROM、DVD-ROM 就采用了由连续块来构成文件的存储方案;但对于可能发生变动的场景,就必须考虑如何跨多个不连续的块来构成为文件。这种需求在数据结构角度看只需在每个块中记录好下一个块的地址,形成链表结构即可满足。但是链表的缺点是只能依次顺序访问,这样访问文件中任何内容都要从头读取多个块,显然过于低效了。真正被广泛运用的解决方案是把形成链表的指针整合起来统一存放,这便形成了文件分配表(File Allocation Table,FAT)的概念。既然已经有了专门组织块结构来构成文件的分配表,那在表中再加入其他控制信息,就能很方便地扩展出更多的高级功能,譬如除了文件占用的块地址信息外,加上文件的逻辑位置就形成了目录,加上文件的访问标志就形成了权限,还可以再加上文件的名称、创建时间、所有者、修改者等一系列的元数据信息来构成其他应用形式。人们把定义文件分配表应该如何实现、储存哪些信息、提供什么功能的标准称为文件系统(File System),FAT32、NTFS、exFAT、ext2/3/4、XFS、BTRFS 等都是很常用的文件系统。而前面介绍存储插件接口时提到的对分区进行高级格式化操作,实际上就是在初始化一套空白的文件系统,供后续用户与应用程序访问。
文件存储相对于块存储来说是更高层次的存储类型,加入目录、权限等元素后形成的树状结构以及路径访问方式方便了人类理解、记忆和访问;文件系统能够提供哪个进程打开或正在读写某个文件的信息,这也有利于文件的共享处理。但在另一方面,计算机需要把路径进行分解,然后逐级向下查找,最后才能查找到需要的文件,要从文件分配表中确定具体数据存储的位置,要判断文件的访问权限,要记录每次修改文件的用户与时间,这些额外操作对于性能产生负面影响也是无可避免的,因此,如果一个系统选择不采用文件存储的话,那磁盘 I/O 性能一般就是最主要的决定因素。
对象储存:对象存储是相对较新的数据存储形式,是一种随着云数据中心的兴起而发展起来的存储,是以非结构化数据为目标的存储方案。这里的“对象”可以理解为一个元数据及与其配对的一个逻辑数据块的组合,元数据提供了对象所包含的上下文信息,譬如数据的类型、大小、权限、创建人、创建时间,等等,数据块则存储了对象的具体内容。你也可以简单地理解为数据和元数据这两样东西共同构成了一个对象。每个对象都有属于自己的全局唯一标识,这个标识会直接开放给最终用户使用,作为访问该对象的主要凭据,通常会是 UUID 的形式。对象存储的访问接口就是根据该唯一标识,对逻辑数据块进行的读写删除操作,通常接口都会十分简单,甚至连修改操作都不会提供。
对象存储基本上只会在分布式存储系统之上去实现,由于对象存储天生就有明确的“元数据”概念,不必依靠文件系统来提供数据的描述信息,因此,完全可以将一大批对象的元数据集中存放在某一台(组)服务器上,再辅以多台 OSD(Object Storage Device)服务器来存储对象的数据块部分。当外部要访问对象时,多台 OSD 能够同时对外发送数据,因此对象存储不仅易于共享、容量庞大,还能提供非常高的吞吐量。不过,由于需要先经过元数据查询确定 OSD 存放对象的确切位置,该过程可能涉及多次网络传输,延迟方面就会表现得相对较差。
由于对象的元数据仅描述对象本身的信息,与其他对象都没有关联,换而言之每个对象都是相互独立的,自然也就不存在目录的概念,可见对象存储天然就是扁平化的,与软件系统中很常见的 K/V 访问相类似,不过许多对象存储会提供 Bucket 的概念,用户可以在逻辑上把它看作是“单层的目录”来使用。由于对象存储天生的分布式特性,以及极其低廉的扩展成本,使它很适合于CDN一类的应用,拿来存放图片、音视频等媒体内容,以及网页、脚本等静态资源。
理解了三种存储类型的基本原理后,接下来又到了治疗选择困难症的环节。主流的云计算厂商,譬如国内的阿里云、腾讯云、华为云都有自己专门的块存储、文件存储和对象存储服务,关于选择服务提供商的问题,笔者不作建议,你根据价格、合作关系、技术和品牌知名度等因素自行去处理。关于应该选择三种存储类型中哪一种的问题,笔者这里以世界云计算市场占有率第一的亚马逊为例,简要对比介绍它不同存储类型产品的差异:
亚马逊的块存储服务是Amazon Elastic Block Store(AWS EBS),你购买 EBS 之后,在 EC2(亚马逊的云计算主机)里看见的是一块原始的、未格式化的块设备。这点就决定了 EBS 并不能做为一个独立存储而存在,它总是和 EC2 同时被创建的,EC2 的操作系统也只能安装在 EBS 之上。EBS 的大小理论上取决于建立的分区方案,即块大小乘以块数量。MBR 分区的块数量是 232,块大小通常是 512 Bytes,总容量为 2 TB;GPT 分区的块数量是 264,块大小通常是 4096 Bytes,总容量 64 ZB。当然这是理论值,64 ZB 已经超过了世界上所有信息的总和,不会有操作系统支持这种离谱的容量,AWS 也设置了上限是 16 TB,在此范围内的实际值就只取决于你的预算额度;EBS 的性能取决于你选择的存储介质类型(SSD、HDD)还有优化类型(通用性、预置型、吞吐量优化、冷存储优化等),这也将直接影响存储的费用成本。
EBS 适合作为系统引导卷,适合追求磁盘 I/O 的大型工作负载以及追求低时延的应用,譬如 Oracle 等可以直接访问块设备的大型数据库更是尤其合适。但 EBS 只允许被单个节点挂载,难以共享,这点在单机时代是天经地义的,但在云计算和分布式时代就成为了很要命的缺陷。除了少数特殊的工作负载外(如前面说的 Oracle 数据库),笔者并不建议将它作为容器编排系统的主要外置存储来使用。
亚马逊的文件存储服务是Amazon Elastic File System(AWS EFS),你购买 EFS 之后,只要在 EFS 控制台上创建好文件系统,并且管理好网络信息(如 IP 地址、子网)就可以直接使用,无需依附于任何 EC2 云主机。EFS 本质是完全托管在云端的网络文件系统(Network File System,NFS),可以在任何兼容 POSIX 的操作系统中直接挂载它,而不会在
/dev中看到新设备存在。按照本节开头 Kubernetes 存储架构中的操作来说就是你只需要考虑 Mount,无需考虑 Attach 了。得益于 NFS 的天然特性,EFS 的扩缩可以是完全自动、实时的,创建新文件时无需预置存储,删除已有文件时也不必手动缩容以节省费用。在高性能网络的支持下,EFS 的性能已经能够达到相当高的水平,尽管由于网络访问的限制,性能最高的 EFS 依然比不过最高水平的 EBS,但仍然能充分满足绝大多数应用运行的需要。还有最重要的一点优势是由于脱离了块设备的束缚,EFS 能够轻易地被成百上千个 EC2 实例共享,考虑到 EFS 的性能、动态弹性、可共享这些因素,笔者给出的明确建议是它可以作为大部分容器工作负载的首选存储。
亚马逊的对象存储服务是Amazon Simple Storage Service(AWS S3),S3 通常是以 REST Endpoint 的形式对外部提供文件访问服务的,这种方式下你应该直接使用程序代码来访问 S3,而不是靠操作系统或者容器编排系统去挂载它。如果你真的希望这样做,也可以通过存储网关(如AWS Storage Gateway)将 S3 的存储能力转换为 NFS、SMB、iSCSI 等访问协议,经过转换后,操作系统或者容器就能够将其作为 Volume 来挂载了。
S3 也许是 AWS 最出名、使用面最广的存储服务,这个结果不是由于它的性能优异,事实上 S3 的性能比起 EBS 和 EFS 来说是相对最差的,但它的优势在于它名字中“Simple”所标榜的简单,我们挂载外部存储的目的十有八九就是为了给程序提供存储服务,使用 S3 不必写一行代码就能够直接通过 HTTP Endpoint 进行读写访问,且完全不需要考虑容量、维护和数据丢失的风险,这就是简单的价值。S3 的另一大优势就是它的价格相对于 EBS 和 EFS 来说往往要低一至两个数量级,因此程序的备份还原、数据归档、灾难恢复、静态页面的托管、多媒体分发等功能就非常适合使用 S3 来完成。
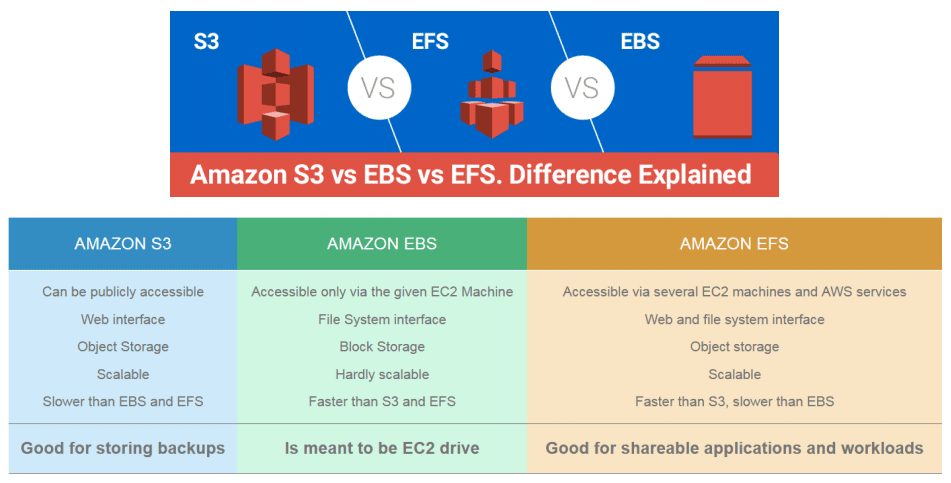
图 13-10 AWS 的 S3、EFS、EBS 对比(图片来自 AWS 的销售材料)
图 13-10 是截取自亚马逊销售材料中三种存储的对比,从目前的存储技术发展来看,不会有哪一种存储方案能够包打天下。不同业务系统的场景需求不同,对存储的诉求会不同,选择自然会不同。
资源与调度
调度是容器编排系统最核心的功能之一,“编排”一词本身便包含有“调度”的含义。调度是指为新创建出来的 Pod 寻找到一个最恰当的宿主机节点来运行它,这个过程成功与否、结果恰当与否,关键取决于容器编排系统是如何管理与分配集群节点的资源的。可以认为调度是必须以容器编排系统的资源管控为前提,那我们就首先从 Kubernetes 的资源模型谈起。
资源模型
开篇先来理清一个概念:资源是什么。资源在 Kubernetes 中是极为常用的术语,广义上讲,Kubernetes 系统中所有你能够接触的方方面面都被抽象成了资源,譬如表示工作负荷的资源(Pod、ReplicaSet、Service、……),表示存储的资源(Volume、PersistentVolume、Secret、……),表示策略的资源(SecurityContext、ResourceQuota、LimitRange、……),表示身份的资源(ServiceAccount、Role、ClusterRole、……),等等。“一切皆为资源”的设计是 Kubernetes 能够顺利施行声明式 API 的必要前提,Kubernetes 以资源为载体,建立了一套同时囊括了抽象元素(如策略、依赖、权限)和物理元素(如软件、硬件、网络)的领域特定语言。通过不同层级间资源的使用关系来描述上至整个集群甚至是集群联邦,下至某一块内存区域或者一小部分的处理器核心的状态,这些对资源状态的描述的集合,共同构成了一幅信息系统工作运行的全景图。
在“以容器构建系统”一节里,笔者首次提到 Kubernetes 的资源模型,将它与控制器模式一并列为 Kubernetes 中最重要的两个设计思想。本节,我们将再次讨论资源模型,但是这里所说的主要是狭义上的物理资源,特指排除了广义上那些逻辑上的抽象资源,只包括能够与真实物理底层硬件对应起来的资源,譬如处理器资源、内存资源、磁盘存储资源,等等。由于我们讨论的话题是调度,作为调度最基本单位的 Pod,只会与这些和物理硬件直接相关的资源产生供需关系,所以后文中提到资源,如无额外说明的话,均是特指狭义上的物理资源。
从编排系统的角度来看,Node 是资源的提供者,Pod 是资源的使用者,调度是将两者进行恰当的撮合。Node 通常能够提供的三方面的资源:计算资源(如处理器、图形处理器、内存)、存储资源(如磁盘容量、不同类型的介质)和网络资源(如带宽、网络地址),其中与调度关系最密切的是处理器和内存,虽然它们同属于计算资源,但两者在调度时又有一些微妙的差别:处理器这样的资源被称作可压缩资源(Compressible Resources),特点是当可压缩资源不足时,Pod 只会处于“饥饿状态”,运行变慢,但不会被系统杀死,即容器被直接终止,或被要求限时退出。而像内存这样的资源,则被称作不可压缩资源(Incompressible Resources),特点是当不可压缩资源不足,或者超过了容器自己声明的最大限度时,Pod 就会因为内存溢出(Out-Of-Memory,OOM)而被系统直接杀掉。
Kubernetes 给处理器资源设定的默认计量单位是“逻辑处理器的个数”。至于具体“一个逻辑处理器”应该如何理解,就要取决于节点的宿主机是如何解释的,通常会是/proc/cpuinfo中看到的处理器数量。它有可能会是多路处理器系统上的一个处理器、多核处理器中的一个核心、云计算主机上的一个虚拟化处理器(Virtual CPU,vCPU),或者处理器核心里的一条超线程(Hyper-Threading)。总之,Kubernetes 只负责保证 Pod 能够使用到“一个处理器”的计算能力,对不同硬件环境构成的 Kubernetes 集群,乃至同一个集群中不同硬件的宿主机节点来说,“一个处理器”所代表的真实算力完全有可能是不一样的。
在具体设置方面,Kubernetes 沿用了云计算中处理器限额设置的一贯做法。如果不明确标注单位,譬如直接写 0.5,默认单位就是Core,即 0.5 个处理器;也可以明确使用Millcores为单位,譬如写成 500 m 同样代表 0.5 个处理器,因为 Kubernetes 规定了1 Core = 1000 Millcores。而对于内存来说,它早已经有了广泛使用的计量单位,即 Bytes,如果设置中不明确标注单位就会默认以 Bytes 计数。为了实际设置的方便,Kubernetes 还支持Ei、Pi、Ti、Gi、Mi、Ki,以及E、P、T、G、M、K为单位,这两者略微有一点点差别,以Mi和M为例,它们分别是Mebibytes与Megabytes的缩写,前者表示 1024×1024 Bytes,后者表示 1000×1000 Bytes。
服务质量与优先级
设定资源计量单位的目的是为了管理员能够限制某个 Pod 对资源的过度占用,避免影响到其他 Pod 的正常运行。Pod 是由一到多个容器所组成,资源最终是交由 Pod 的各个容器去使用,所以资源的需求是设定在容器上的,具体的配置是 Pod 的spec.containers[].resource.limits/requests.cpu/memory字段。但是对资源需求的配额则不是针对容器的,而是针对 Pod 整体,Pod 的资源配额无需手动设置,它就是它包含的每个容器资源需求的累加值。
为容器设定最大的资源配额的做法从 cgroups 诞生后已经屡见不鲜,但你是否注意到 Kubernetes 给出的配置中有limits和requests两个设置项?这两者的区别其实很简单:requests是给调度器用的,Kubernetes 选择哪个节点运行 Pod,只会根据requests的值来进行决策;limits才是给 cgroups 用的,Kubernetes 在向 cgroups 的传递资源配额时,会按照limits的值来进行设置。
Kubernetes 采用这样的设计完全是基于“心理学”的原因,是因为 Google 根据 Borg 和 Omega 系统长期运行的实践经验,总结出了一条经验法则:用户提交工作负载时设置的资源配额,并不是容器调度一定必须严格遵守的值,因为根据实际经验,大多数的工作负载运行过程中真正使用到的资源,其实都远小于它所请求的资源配额。
Purchase Quota
Even though we encourage users to purchase no more quota than they need, many users overbuy because it insulates them against future shortages when their application’s user base grows.
即使我们已经努力建议用户不要过度申请资源配额,但仍难免有大量用户过度消费,他们总希望避免因用户增长而产生资源不足的现象。
—— Large-Scale Cluster Management at Google with Borg,Google
“多多益善”的想法完全符合人类的心理,大家提交的资源需求通常都是按照可能面临的最大压力去估计的,甚至考虑到了未来用户增长所导致的新需求。为了避免服务因资源不足而中断,都会往大了去申请,这点我们可以理解,但如果直接按照申请的资源去分配限额,所导致的结果必然是服务器一方面在大多数时间里都会有大量硬件资源闲置,另一方面这些闲置资源又已经分配出去,有了明确的所有者,不能再被其他人利用,难以真正发挥价值。
不大可能仅仅是因为 Kubernetes 将一个资源配额的设置,拆分成limits和requests两个设置项就能解决这个矛盾的,Kubernetes 为此还进行了许多额外的处理。一旦选择不按照最保守、最安全的方式去分配资源,就意味着容器编排系统必须为有可能出现的极端情况而买单,如果允许节点给 Pod 分配资源总和超过自己最大的可提供资源的话,假如某个时刻这些 Pod 的总消耗真的超标了,便会不可避免地导致节点无法继续遵守调度时对 Pod 许下的资源承诺,此时,Kubernetes 迫不得已要杀掉一部分 Pod 腾出资源来保证其余 Pod 能正常运行,这个操作就是稍后会介绍的驱逐机制(Eviction)。要进行驱逐,首先 Kubernetes 就必须拿出资源不足时该先牺牲哪些 Pod、该保留哪些 Pod 的明确准则,由此就形成了 Kubernetes 的服务质量等级(Quality of Service Level,QoS Level)和优先级(Priority)的概念。试想 Kubernetes 若不是为了理性对抗人类“多多益善”的心理,尽可能提高硬件利用效率,而是直接按申请的最大资源去安排调度,那原本它是无需理会这些麻烦事的。
质量等级是 Pod 的一个隐含属性,也是 Kubernetes 优先保障重要的服务,放弃一些没那么重要的服务的衡量准绳。不知道你是否想到这样一个细节:如果不去设置limits和requests会怎样?答案是不设置处理器和内存的资源,就意味着没有上限,该 Pod 可以使用节点上所有可用的计算资源。但你先别高兴得太早,这类 Pod 能以最灵活的方式去使用资源,但也正是这类 Pod 扮演着最不稳定的风险来源的角色。在论文《Large-Scale Cluster Management at Google with Borg》中,Google 明确地提出了针对这类 Pod 的一种近乎带惩罚性质的处理建议:当节点硬件资源不足时,优先杀掉这类 Pod,说得文雅一点的话,就是给予这类 Pod 最低的服务质量等级。
Kubernetes 目前提供的服务质量等级一共分为三级,由高到低分别为 Guaranteed、Burstable 和 BestEffort。如果 Pod 中所有的容器都设置了limits和requests,且两者的值相等,那此 Pod 的服务质量等级便为最高的 Guaranteed;如果 Pod 中有部分容器的 requests 值小于limits值,或者只设置了requests而未设置limits,那此 Pod 的服务质量等级为第二级 Burstable;如果是刚才说的那种情况,limits和requests两个都没设置就是最低的 BestEffort 了。
通常建议将数据库应用等有状态的应用,或者一些重要的要保证不能中断的业务的服务质量等级定为 Guaranteed,这样除非 Pod 使用超过了它们的limits所描述的不可压缩资源,或者节点的内存压力大到 Kubernetes 已经杀光所有等级更低的 Pod 了,否则它们都不会被系统自动杀死。相对地,应将一些临时的、不那么重要的任务设置为 BestEffort,这样有利于它们调度时能在更大的节点范围中寻找宿主机,也利于它们在宿主机中利用更多的资源快速地完成任务,然后退出,尽量缩减影响范围;当然,遇到系统资源紧张时,它们也更容易被系统杀掉。
小说《动物庄园》:
All animals are equal, but some animals are more equal than others.
所有动物生来平等,但有些动物比其他动物更加平等。
—— Animal Farm: A Fairy Story,George Orwell, 1945
除了服务质量等级以外,Kubernetes 还允许系统管理员自行决定 Pod 的优先级,这是通过类型为 PriorityClass 的资源来实现的。优先级决定了 Pod 之间并不是平等的关系,而且这种不平等还不是谁会占用更多一点的资源的问题,而是会直接影响 Pod 调度与生存的关键。
优先级会影响调度这很容易理解,它是指当多个 Pod 同时被调度的话,高优先级的 Pod 会优先被调度。Pod 越晚被调度,就越大概率因节点资源已被占用而不能成功。但优先级影响更大的另一方面是指 Kubernetes 的抢占机制(Preemption),正常未设置优先级的情况下,如果 Pod 调度失败,就会暂时处于 Pending 状态被搁置起来,直到集群中有新节点加入或者旧 Pod 退出。但是,如果有一个被设置了明确优先级的 Pod 调度失败无法创建的话,Kubernetes 就会在系统中寻找出一批牺牲者(Victims),将它们杀掉以便给更高优先级的 Pod 让出资源。寻找的原则是根据在优先级低于待调度 Pod 的所有已调度 Pod 里,按照优先级从低到高排序,从最低的杀起,直至腾出的资源足以满足待调度 Pod 的成功调度为止,或者已经找不到更低优先级的 Pod 为止。
驱逐机制
前面笔者动不动就提要杀掉某个 Pod,听起来实在是欠优雅的,在 Kubernetes 中专业的称呼是“驱逐”(Eviction,即资源回收)。Pod 的驱逐机制是通过 kubelet 来执行的,kubelet 是部署在每个节点的集群管理程序,由于本身就运行在节点中,所以最容易感知到节点的资源实时耗用情况。kubelet 一旦发现某种不可压缩资源将要耗尽,就会主动终止节点上较低服务质量等级的 Pod,以保证其他更重要的 Pod 的安全。被驱逐的 Pod 中所有的容器都会被终止,Pod 的状态会被更改为 Failed。
我们已经接触过内存这一种最重要的不可压缩资源,默认配置下,前面所说的“资源即将耗尽”的“即将”,具体阈值是可用内存小于 100 Mi。除了可用内存(memory.available)外,其他不可压缩资源还包括有:宿主机的可用磁盘空间(nodefs.available)、文件系统可用inode数量(nodefs.inodesFree),以及可用的容器运行时镜像存储空间(imagefs.available)。后面三个的阈值都是按照实际容量的百分比来计算的,具体的默认值如下:
memory.available < 100Mi
nodefs.available < 10%
nodefs.inodesFree < 5%
imagefs.available < 15%管理员可以在 kubelet 启动时,通过命令行参数来修改这些默认值,譬如可用内存只剩余 100 Mi 时才启动驱逐对于多数生产系统来说都过于危险了,笔者建议在生产环境中考虑通过以下命令调整为剩余 10%内存时即开始驱逐:
$ kubelet --eviction-hard=memory.available<10%如果你是一名 Java、C#、Golang 等习惯了自动内存管理机制的程序员,笔者还要提醒你 Kubernetes 的驱逐不能完全等同于编程语言中的垃圾收集器。垃圾收集是安全的内存回收行为,而驱逐 Pod 是一种毁坏性的清理行为,有可能会导致服务产生中断,必须更加谨慎。譬如,要同时兼顾到硬件资源可能只是短时间内间歇性地超过了阈值的场景,以及资源正在被快速消耗,很快就会危及高服务质量的 Pod 甚至是整个节点稳定的场景。因此,驱逐机制中就有了软驱逐(Soft Eviction)、硬驱逐(Hard Eviction)以及优雅退出期(Grace Period)的概念:
- 软驱逐:通常配置一个较低的警戒线(譬如可用内存仅剩 20%),触及此线时,系统将进入一段观察期。如果只是暂时的资源抖动,在观察期内能够恢复到正常水平的话,那就不会真正启动驱逐操作。否则,资源持续超过警戒线一段时间,就会触发 Pod 的优雅退出(Grace Shutdown),系统会通知 Pod 进行必要的清理工作(譬如将缓存的数据落盘),然后自行结束。在优雅退出期结束后,系统会强制杀掉还未曾自行了断的 Pod。
- 硬驱逐:通常配置一个较高的终止线(譬如可用内存仅剩 10%),一旦触及此红线,立即强制杀掉 Pod,不理会优雅退出。
软驱逐是为了减少资源抖动对服务的影响,硬驱逐是为了保障核心系统的稳定,它们并不矛盾,一般会同时使用,譬如以下例子所示:
$ kubelet --eviction-hard=memory.available<10% \
--eviction-soft=memory.available<20% \
--eviction-soft-grace-period=memory.available=1m30s \
--eviction-max-pod-grace-period=600Kubernetes 的驱逐与编程语言中垃圾收集器另一个不同之处是垃圾收集可以“应收尽收”,而驱逐显然不行,不能无缘无故把整个节点中所有可驱逐的 Pod 都清空掉。但是,通常也不能只清理到刚刚低于警戒线就停止,必须考虑到驱逐之后的新 Pod 调度与旧 Pod 运行的新增消耗。譬如 kubelet 驱逐了若干个 Pod,让资源使用率勉强低于阈值,那么很可能在极短的时间内,资源使用率又会因某个 Pod 稍微占用了些许资源而重新超过阈值,再产生新一次驱逐,如此往复。为此,Kubernetes 提供了--eviction-minimum-reclaim参数用于设置一旦驱逐发生之后,至少清理出来多少资源才会终止。
不过,问题到这里还是没有全部解决,Kubernetes 中很少会单独创建 Pod,通常都是由 ReplicaSet、Deployment 等更高层资源来管理的,这意味着当 Pod 被驱逐之后,它不会从此彻底消失,Kubernetes 将自动生成一个新的 Pod 来取代,并经过调度选择一个节点继续运行。如果没有额外的处理,那很大概率这个 Pod 会被系统调度到当前这个节点上重新创建,因为上一次调度就选择了这个节点,而且这个节点刚刚驱逐完一批 Pod 得到了空闲资源,那它显然应该符合此 Pod 的调度需求。为了避免被驱逐的 Pod 出现“阴魂不散”的问题,Kubernetes 还提供了另一个参数--eviction-pressure-transition-period来约束调度器,在驱逐发生之后多长时间内不得往该节点调度 Pod。
关于驱逐机制,你还应该意识到,这些措施既然被设计为以参数的形式开启,就说明了它们一定不是放之四海皆准的通用准则。举个例子,假设当前 Pod 是由 DaemonSet 控制的,一旦该 Pod 被驱逐,你又强行不允许节点在一段时间内接受调度,那显然这就有违 DaemonSet 的语义。目前 Kubernetes 并没有办法区分 Pod 是由 DaemonSet 抑或是别的高层次资源创建的,因此这种假设情况确实有可能发生,比较合理的方案是让 DaemonSet 创建 Guaranteed 而不是 BestEffort 的 Pod。总而言之,在 Kubernetes 还没有成熟到变为“傻瓜式”容器编排系统之前,因地制宜地合理配置和运维是都非常必要的。
最后,关于服务质量、优先级、驱逐机制这些概念,都是在 Pod 层面上限制资源,是仅针对单个 Pod 的低层次约束,现实中我们还常会遇到面向更高层次去控制资源的需求,譬如,想限制由多个 Pod 构成的微服务系统耗用的总资源,或者是由多名成员组成的团队耗用的总资源。举个具体例子,想要在拥有 32 GiB 内存和 16 个处理器的集群里,允许 A 团队使用 20 GiB 内存和 10 个处理器的资源,再允许 B 团队使用 10 GiB 内存和 4 个处理器的资源,再预留 2 GiB 内存和 2 个处理器供将来分配。要满足这种资源限制的需求,Kubernetes 的解决方案是应该先为它门建立一个专用的名称空间,然后再在名称空间里建立 ResourceQuota 对象来描述如何进行整体的资源约束。
但是 ResourceQuota 与调度就没有直接关系了,它针对的对象也不是 Pod,所以这里所说的资源可以是广义上的资源,不仅能够设置处理器、内存等物理资源的限额,还可以设置诸如 Pod 最大数量、ReplicaSet 最大数量、Service 最大数量、全部 PersistentVolumeClaim 的总存储容量等各种抽象资源的限额。甚至当 Kubernetes 预置的资源模型不能满足约束需要时,还能够根据实际情况去拓展,譬如要控制 GPU 的使用数量,完全可以通过 Kubernetes 的设备插件(Device Plugin)机制拓展出诸如nvidia.com/gpu: 4这样的配置来。
默认调度器
本节的最后一部分,我们回过头来探讨开篇提出的问题:Kubernetes 是如何撮合 Pod 与 Node 的,这其实也是最困难的一个问题。调度是为新创建出来的 Pod 寻找到一个最恰当的宿主机节点去运行它,这句话里就包含有“运行”和“恰当”两个调度中关键过程,它们具体是指:
- 运行:从集群所有节点中找出一批剩余资源可以满足该 Pod 运行的节点。为此,Kubernetes 调度器设计了一组名为 Predicate 的筛选算法。
- 恰当:从符合运行要求的节点中找出一个最适合的节点完成调度。为此,Kubernetes 调度器设计了一组名为 Priority 的评价算法。
这两个算法的具体内容稍后笔者会详细解释,这里要先说明白一点:在几个、十几个节点的集群里进行调度,调度器怎么实现都不会太困难,但是对于数千个乃至更多节点的大规模集群,要实现高效的调度就绝不简单。请你想象一下,若一个由数千节点组成的集群,每次 Pod 的创建都必须依据各节点的实时资源状态来确定调度的目标节点,然而各节点的资源是随着程序运行无时无刻都在变动的,资源状况只有它本身才清楚,如果每次调度都要发生数千次的远程访问来获取这些信息的话,那压力与耗时都难以降下来。结果不仅会令调度器成为集群管理的性能瓶颈,还会出现因耗时过长,某些节点上资源状况已发生变化,调度器的资源信息过时而导致调度结果不准确等问题。
Scheduler
Clusters and their workloads keep growing, and since the scheduler’s workload is roughly proportional to the cluster size, the scheduler is at risk of becoming a scalability bottleneck.
由于调度器的工作负载与集群规模大致成正比,随着集群和它们的工作负载不断增长,调度器很有可能会成为扩展性瓶颈所在。
—— Omega: Flexible, Scalable Schedulers for Large Compute Clusters,Google
针对以上问题,Google 在论文《Omega: Flexible, Scalable Schedulers for Large Compute Clusters》里总结了自身的经验,并参考了当时Apache Mesos和Hadoop on Demand(HOD)的实现,提出了一种共享状态(Shared State)的双循环调度机制。这种调度机制后来不仅应用在 Google 的 Omega 系统(Borg 的下一代集群管理系统)中,也同样被 Kubernetes 继承了下来,它整体的工作流程如图 14-1 所示:
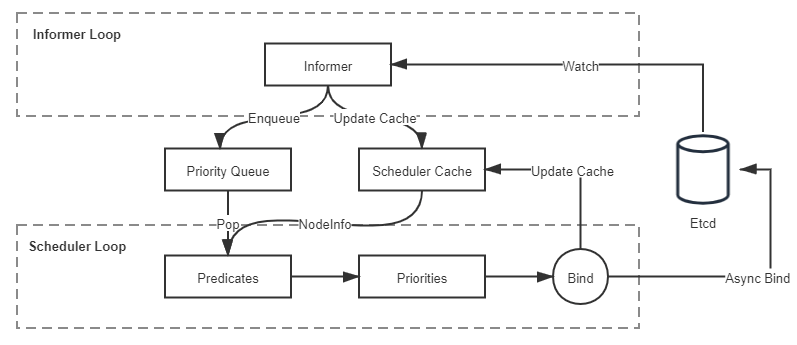
图 14-1 状态共享的双循环
状态共享的双循环中第一个控制循环可被称为“Informer Loop”,它是一系列Informer的集合,这些 Informer 持续监视 Etcd 中与调度相关资源(主要是 Pod 和 Node)的变化情况,一旦 Pod、Node 等资源出现变动,就会触发对应 Informer 的 Handler。Informer Loop 的职责是根据 Etcd 中的资源变化去更新调度队列(Priority Queue)和调度缓存(Scheduler Cache)中的信息,譬如当有新 Pod 生成,就将其入队(Enqueue)到调度队列中,如有必要,还会根据优先级触发上一节提到的插队和抢占操作。又譬如有新的节点加入集群,或者已有节点资源信息发生变动,Informer 也会将这些信息更新同步到调度缓存之中。
另一个控制循环可被称为“Scheduler Loop”,它的核心逻辑是不停地将调度队列中的 Pod 出队(Pop),然后使用 Predicate 算法进行节点选择。Predicate 本质上是一组节点过滤器(Filter),它根据预设的过滤策略来筛选节点,Kubernetes 中默认有三种过滤策略,分别是:
- 通用过滤策略:最基础的调度过滤策略,用来检查节点是否能满足 Pod 声明中需要的资源。譬如处理器、内存资源是否满足,主机端口与声明的 NodePort 是否存在冲突,Pod 的选择器或者nodeAffinity指定的节点是否与目标相匹配,等等。
- 卷过滤策略:与存储相关的过滤策略,用来检查节点挂载的 Volume 是否存在冲突(譬如将一个块设备挂载到两个节点上),或者 Volume 的可用区域是否与目标节点冲突,等等。在“Kubernetes 存储设计”中提到的 Local PersistentVolume 的调度检查,便是在这里处理的。
- 节点过滤策略:与宿主机相关的过滤策略,最典型的是 Kubernetes 的污点与容忍度机制(Taints and Tolerations),譬如默认情况下 Kubernetes 会设置 Master 节点不允许被调度,这就是通过在 Master 中施加污点来避免的。之前提到的控制节点处于驱逐状态,或者在驱逐后一段时间不允许调度,也是在这个策略里实现的。
Predicate 算法所使用的一切数据均来自于调度缓存,绝对不会去远程访问节点本身。只有 Informer Loop 与 Etcd 的监视操作才会涉及到远程调用,Scheduler Loop 中除了最后的异步绑定要发起一次远程的 Etcd 写入外,其余全部都是进程内访问,这一点是调度器执行效率的重要保证。
调度缓存就是两个控制循环的共享状态(Shared State),这样的设计避免了每次调度时主动去轮询所有集群节点,保证了调度器的执行效率。但是并不能完全避免因节点信息同步不及时而导致调度过程中实际资源发生变化的情况,譬如节点的某个端口在获取调度信息后、发生实际调度前被意外占用了。为此,当调度结果出来以后,kubelet 真正创建 Pod 以前,还必须执行一次 Admit 操作,在该节点上重新做一遍 Predicate 来进行二次确认。
经过 Predicate 算法筛选出来符合要求的节点集,会交给 Priorities 算法来打分(0-10 分)排序,以便挑选出“最恰当”的一个。“恰当”是带有主观色彩的词语,Kubernetes 也提供了不同的打分规则来满足不同的主观需求,譬如最常用的 LeastRequestedPriority 规则,它的计算公式是:
score = (cpu((capacity-sum(requested))×10/capacity) + memory((capacity-sum(requested))×10/capacity))/2从公式上很容易看出这就是在选择处理器和内存空闲资源最多的节点,因为这些资源剩余越多,得分就越高。经常与它一起工作的是 BalancedResourceAllocation 规则,它的公式是:
score = 10 - variance(cpuFraction,memoryFraction,volumeFraction)×10此公式中 cpuFraction、memoryFraction、volumeFraction 的含义分别是 Pod 请求的处理器、内存和存储资源占该节点上对应可用资源的比例,variance 函数的作用是计算资源之间的差距,差距越大,函数值越大。由此可知 BalancedResourceAllocation 规则的意图是希望调度完成后,所有节点里各种资源分配尽量均衡,避免节点上出现诸如处理器资源被大量分配、而内存大量剩余的尴尬状况。Kubernetes 内置的其他的评分规则还有 ImageLocalityPriority、NodeAffinityPriority、TaintTolerationPriority 等等,有兴趣的话可以阅读 Kubernetes 的源码,笔者就不再逐一解释了。
经过 Predicate 的筛选、Priorities 的评分之后,调度器已经选出了调度的最终目标节点,最后一步是通知目标节点的 kubelet 可以去创建 Pod 了。调度器并不会直接与 kubelet 通讯来创建 Pod,它只需要把待调度的 Pod 的nodeName字段更新为目标节点的名字即可,kubelet 本身会监视该值的变化来接手后续工作。不过,从调度器在 Etcd 中更新nodeName,到 kubelet 从 Etcd 中检测到变化,再执行 Admit 操作二次确认调度可行性,最后到 Pod 开始实际创建,这个过程可能会持续一段不短的时间,如果一直等待这些工作都完成了才宣告调度最终完成,那势必也会显著影响调度器的效率。实际上 Kubernetes 调度器采用了乐观绑定(Optimistic Binding)的策略来解决此问题,它会同步地更新调度缓存中 Pod 的nodeName字段,并异步地更新 Etcd 中 Pod 的nodeName字段,这个操作被称为绑定(Binding)。如果最终调度成功了,那 Etcd 与调度缓存中的信息最终必定会保持一致,否则,如果调度失败了,那将会由 Informer 来根据 Pod 的变动,将调度成功却没有创建成功的 Pod 清空nodeName字段,重新同步回调度缓存中,以便促使另外一次调度的开始。
最后,请注意笔者在这一个部分的小标题用的是“默认调度器”,这是强调以上行为仅是 Kubernetes 默认的行为。对调度过程的大部分行为,你都可以通过 Scheduler Framework 暴露的接口来进行扩展和自定义,如下图所示,绿色的部分就是 Scheduler Framework 暴露的扩展点。由于 Scheduler Framework 属于 Kubernetes 内部的扩展机制(通过 Golang 的 Plugin 机制来实现的,需静态编译),通用性与本章提到的其他扩展机制(CRI、CNI、CSI 那些)无法相提并论,属于较为高级的 Kubernetes 管理技能了,这里笔者仅在这里简单地提一下,就不多做介绍了。
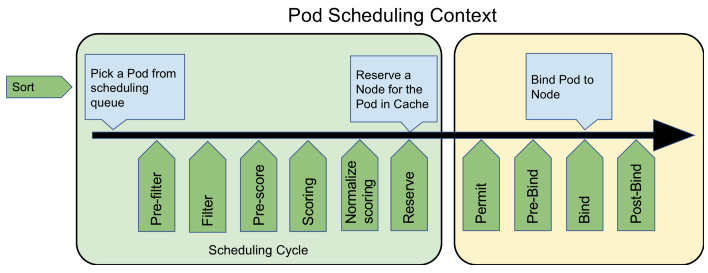
图 14-2 Scheduler Framework 的可扩展性(图片来源)
服务网格
服务网格(Service Mesh)
A service mesh is a dedicated infrastructure layer for handling service-to-service communication. It’s responsible for the reliable delivery of requests through the complex topology of services that comprise a modern, cloud native application. In practice, the service mesh is typically implemented as an array of lightweight network proxies that are deployed alongside application code, without the application needing to be aware.
服务网格是一种用于管控服务间通信的的基础设施,职责是为现代云原生应用支持网络请求在复杂的拓扑环境中可靠地传递。在实践中,服务网格通常会以轻量化网络代理的形式来体现,这些代理与应用程序代码会部署在一起,对应用程序来说,它完全不会感知到代理的存在。
—— What’s A Service Mesh? And Why Do I Need One?,Willian Morgan,Buoyant CEO,2017
容器编排系统管理的最细粒度只能到达容器层次,在此粒度之下的技术细节,仍然只能依赖程序员自己来管理,编排系统很难提供有效的支持。2016 年,原 Twitter 基础设施工程师 William Morgan 和 Oliver Gould 在 GitHub 上发布了第一代的服务网格产品 Linkerd,并在很短的时间内围绕着 Linkerd 组建了 Buoyant 公司,担任 CEO 的 William Morgan 发表的文章《What’s A Service Mesh? And Why Do I Need One?》中首次正式地定义了“服务网格”(Service Mesh)一词,此后,服务网格作为一种新兴通信理念开始迅速传播,越来越频繁地出现在各个公司以及技术社区的视野中。之所以服务网格能够获得企业与社区的重视,就是因为它很好地弥补了容器编排系统对分布式应用细粒度管控能力高不足的缺憾。
服务网格并不是什么神秘难以理解的黑科技,它只是一种处理程序间通信的基础设施,典型的存在形式是部署在应用旁边,一对一为应用提供服务的边车代理,及管理这些边车代理的控制程序。“边车”(Sidecar)本来就是一种常见的容器设计模式,用来形容外挂在容器身上的辅助程序。早在容器盛行以前,边车代理就已有了成功的应用案例,譬如 2014 年开始的Netflix Prana 项目,由于 Netflix OSS 套件是用 Java 语言开发的,为了让非 JVM 语言的微服务,譬如以 Python、Node.js 编写的程序也同样能接入 Netflix OSS 生态,享受到 Eureka、Ribbon、Hystrix 等框架的支持,Netflix 建立了 Prana 项目,它的作用是为每个服务都提供一个专门的 HTTP Endpoint,使得非 JVM 语言的程序能通过访问该 Endpoint 来获取系统中所有服务的实例、相关路由节点、系统配置参数等在 Netflix 组件中管理的信息。
Netflix Prana 的代理需要由应用程序主动去访问才能发挥作用,但在容器的刻意支持下,服务网格无需应用程序的任何配合,就能强制性地对应用通信进行管理。它使用了类似网络攻击里中间人流量劫持的手段,完全透明(既无需程序主动访问,也不会被程序感知到)地接管掉容器与外界的通信,将管理的粒度从容器级别细化到了每个单独的远程服务级别,使得基础设施干涉应用程序、介入程序行为的能力大为增强。如此一来,云原生希望用基础设施接管应用程序非功能性需求的目标就能更进一步,从容器粒度延伸到远程访问,分布式系统继容器和容器编排之后,又发掘到另一块更广袤的舞台空间。
透明通信的涅槃
被分布式舍弃的 Unix 的设计哲学
原始分布式时代提出的构建“符合 Unix 的设计哲学的”、“如同本地调用一般简单透明的”分布式系统这个目标,是软件开发者对分布式系统最初的美好愿景,迫于现实,它会在一定时期内被妥协、被舍弃,分布式将会经过一段越来越复杂的发展进程。但是,到了三十多年以后的将来,随着分布式架构的逐渐成熟完善,取代单体成为大型软件的主流架构风格以后,这个美好的愿景终将还是会重新被开发者拾起。
Kubernetes 为它管理的工作负载提供了工业级的韧性与弹性,也为每个处于运行状态的 Pod 维护了相互连通的虚拟化网络。不过,程序之间的通信不同于简单地在网络上拷贝数据,具备可连通的网络环境仅仅是程序间能够可靠通信的必要但非充分的条件,作为一名经历过 SOA、微服务、云原生洗礼的分布式程序员,你必定已深谙路由、容错、限流、加密、认证、授权、跟踪、度量等问题在分布式系统中都是无可回避的。
在本书开篇的“远程服务调用”一节里,笔者曾以“通信的成本”为题,讲述了三十多年计算机科学家们对“远程服务调用是否可能实现为透明通信”的一场声势浩大的争论。今天,服务网格的诞生在某种意义上可以说便是当年透明通信的重生,服务网格试图以容器、虚拟化网络、边车代理等技术所构筑的新一代通信基础设施为武器,重新对已盖棺定论三十多年的程序间远程通信不是透明的原则发起冲击。今天,这场关于通信的变革仍然在酝酿发展当中,最后到底会是成功的逆袭,抑或是另一场失败,笔者不敢妄言定论,但是作为程序通信发展历史的一名见证者,笔者丝毫不吝对服务网格投去最高的期许与最深的祝愿。
通信的成本
程序间通信是分布式架构的核心内容,这节内容分析不同时期应用程序如何看待与实现通信方面的非功能性需求,如何做到可靠的通信的,通过以下五个阶段的变化,理解分布式服务的通信是如何逐步演化成本章主角服务网格。
第一阶段:早期分布式计算
自计算机诞生之初,就有了在两台主机上进行服务(进程)调用的需求,早期的分布式主机通信方式如下图所示。
在实际情况中,通信需要底层能够传输字节码和电子信号的物理层来完成,为了屏蔽跨主机调用的网络通信和其他底层机制,我们在计算机系统中引入了网络栈驱动,将跨主机的通信复杂度交由网络栈处理。
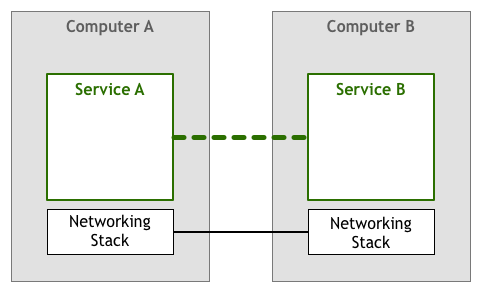
在 TCP 协议出现之前,服务需要自己处理网络通信所面临的丢包、乱序、重试等一系列流控问题,因此服务实现中,除了业务逻辑外,还夹杂着对网络传输问题的处理逻辑。这个模型在早期系统并不复杂的时期尚可维护,但是随着计算机的成本变得越来越低,连接数和数据量也大幅增加。人们越来越依赖网络系统,就需要找到让机器互相发现的解决方案,通过同一条线路同时处理多个连接,允许机器在非直连的情况下互相通信,通过网络对数据包进行路由、加密等。在这之中,多节点通信时就需要考虑流量控制问题。流量控制机制可以防止一台服务器发送的数据包超过下游服务器的承受上限。这在分布式环境下是十分必要的。
将应用拆分成业务逻辑层和流量控制层,带网络栈和流量控制的早期分布式主机通信方式如下图所示。
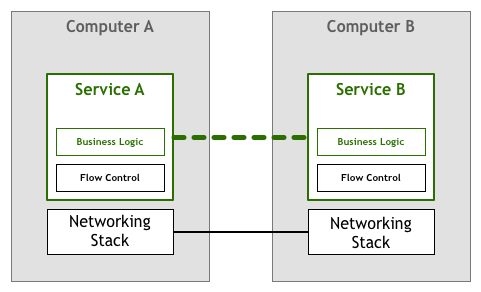
为了避免每个服务都需要自己实现一套相似的网络传输处理逻辑,TCP/IP 标准协议出现了,它解决了网络传输中通用的流量控制问题,将技术栈下移,从服务的实现中抽离出来,成为操作系统网络层的一部分。将流量控制和网络栈整合在一起之后,早期的分布式主机通信方式如下图所示。
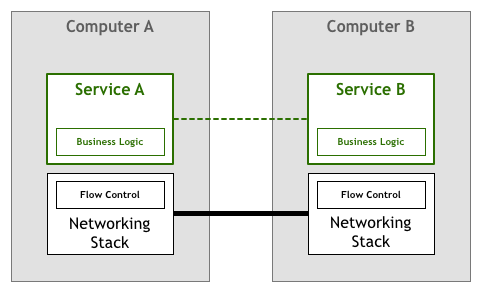
第二阶段:微服务时代的分布式计算
随着时代的发展,当分布式系统的组成从几个大型的中央计算机发展成数以千计的小型服务时,简单的冗余架构已经不能支撑服务的正常运行了。过去用 TCP/IP 协议栈和通用网络模型可以屏蔽分布式计算中的通信问题,但更复杂、更细碎的分布式架构让我们不仅要考量计算的可用性,更要考量计算的服务发现和过载熔断。这个时候就出现了服务发现和熔断器。
服务发现是在满足给定查询条件的情况下自动查找服务实例的过程。在简单架构中,DNS 加上负载均衡可以完全胜任这个功能。但是当服务极度分散的时候,每台客户端在不同的网络环境下需要访问部署在不同机房的服务,并且还需要及时的更新对应的服务状态以保证客户端对服务端的正确发现,仅靠 DNS 显然是完全不够的。
熔断器的基本思想非常简单。将一个受保护的函数调用包含在用于监视故障的熔断器对象中,一旦故障数达到一个阈值,熔断器便会跳闸,并且对熔断器的所有后续调用都将返回错误,完全不接受对受保护函数的调用。通常,如果熔断器发生跳闸,还需要监控报警。
基于早期的分布式结构,在应用中加入熔断器和服务发现,第二代分布式主机通信模型如下图。
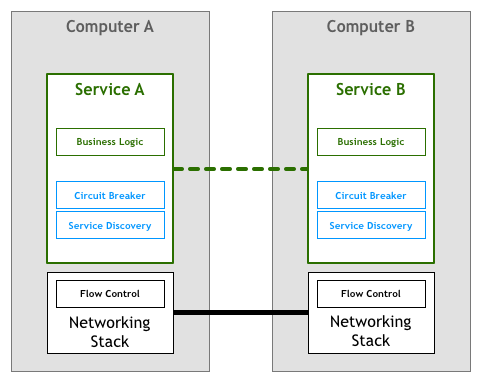
这一阶段的主要问题是将通信的非功能性需求视作业务需求的一部分,通信的可靠性由程序员来保障。但控制逻辑和业务逻辑耦合会造成大多数擅长业务逻辑但不擅长控制逻辑的开发人员很难支撑起一个靠谱的分布式系统。另一方面,把专业的通信功能强加于普通开发人员,无疑为他们带来了更多工作量,尤其是这些“额外的工作”与原有的业务逻辑耦合在一起,让系统越来越复杂,也越来越容易出错。
而对于服务发现和熔断器本身而言,或者是负载均衡、认证和授权、Quota 限制、Trace 和监控,它们的功能是基础且通用的,将代码中的通信功能抽离重构成公共组件库,通信的可靠性由专业的平台程序员来保障,因此得到以下分布式主机通信模型。
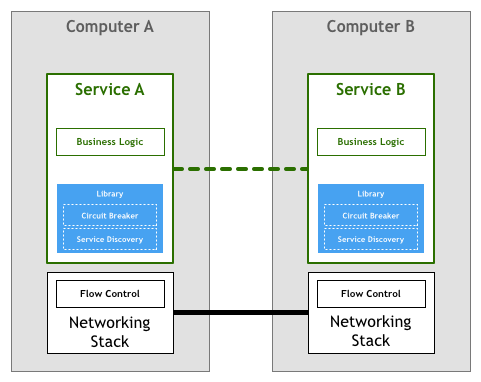
虽然我们用上述技术实现了微服务,但是随着服务数量呈几何级增长,我们也发现了这种方法中存在着的各种弊端。
- 其一,虽然框架屏蔽了分布式系统通信的通用实现细节,但对原有代码的侵入性很强,底层替换的成本过高,追踪和解决框架出现的问题非常困难,容易使团队成员将大量的精力花费在底层服务治理机制上,而不能集中注意力关心业务。
- 其二,开发框架通常只支持一种或几种特定的语言,回过头来看文章最开始对微服务的定义,一个重要的特性就是语言无关,但那些没有框架支持的语言编写的服务,很难融入面向微服务的架构体系,想因地制宜的用多种语言实现架构体系中的不同模块也很难做到。
- 其三,框架以 LIB 库的形式和服务联编,复杂项目依赖时的库版本兼容问题非常棘手,同时,框架库的升级也无法对服务透明,服务会因为和业务无关的lib库升级而被迫升级。
所以,如同早期将分布式计算的细节下沉到网络协议中一样,例如熔断器和服务发现这些大规模分布式服务所需的功能,也应该放到底层的平台中。目前,基于公共组件库开发微服务仍然是应用最为广泛的解决方案,但肯定不是一种完美的解决方案,这是微服务基础设施完全成熟之前必然会出现的应用形态,同时也一定是微服务进化过程中必然会被替代的过渡形态。
人们使用高级协议(如 HTTP)编写非常复杂的应用程序和服务时,无须考虑 TCP 是如何控制网络上的数据包的。这就是微服务所需要的,这样可以让那些从事服务开发工作的工程师专注于业务逻辑的开发,从而避免浪费时间去编写服务基础设施代码或管理整个系统的库和框架。
综上所述,将熔断器和服务发现从业务中剥离,我们便得到了对应的分布式主机通信模型,如下图所示。
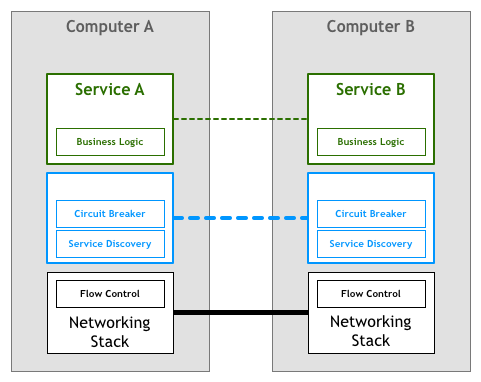
第三阶段:基于 Network Proxy 思想的分布式计算
微服务基础设施完全成熟后,负责通信的公共组件库会被分离到进程之外,程序间通过网络代理来交互,通信的可靠性由专门的网络代理提供商来保障。
为了能够把分布式通信组件与具体的编程语言脱钩,也为了避免程序员还要去专门学习这些组件的编程模型与 API 接口,这一阶段进化出了能专门负责可靠通信的网络代理。这些网络代理不再与业务逻辑部署于同一个进程空间,但仍然与业务系统处于同一个容器或者虚拟机当中,可以通过回环设备甚至是UDS(Unix Domain Socket)进行交互,具备相当高的网络性能。只要让网络代理接管掉程序七层或四层流量,就能够在代理上完成断路、容错等几乎所有的分布式通信功能,前面提到过的 Netflix Prana 就属于这类产品的典型代表。
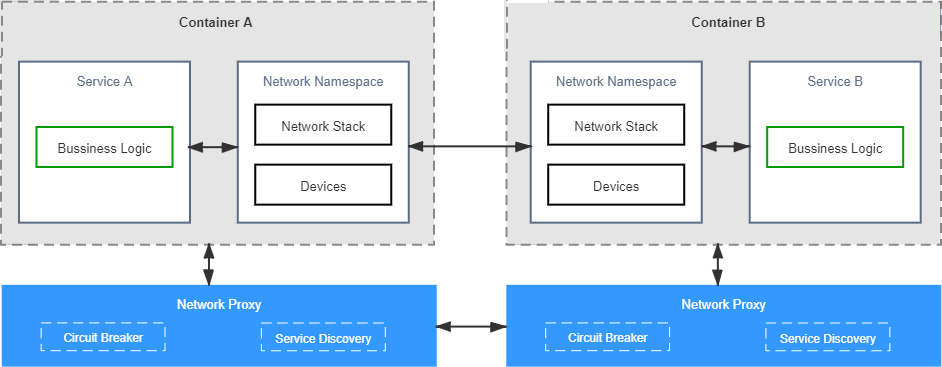
通过网络代理来提升通信质量的思路提出以后,它本身使用范围其实并不算特别广泛,但它的方向是正确的。这种思路后来演化出了两种改进形态:一方面,如果将网络代理从进程身边拉远,让它与进程分别处于不同的机器上,这样就可以同时给多个进程提供可靠通信的代理服务,这条路线逐渐形成了今天常见的微服务网关,在网关上同样可以实现流控、容错等功能。另一方面,如果将网络代理往进程方向推近,不仅让它与进程处于一个共享了网络名称空间的容器组之中,还要让它透明并强制地接管通讯,这便形成了下一阶段所说的边车代理。
第四阶段:SideCar Network Proxy
将网络代理以边车的形式注入到应用容器,自动劫持应用的网络流量,通信的可靠性由专门的通信基础设施来保障。
与前一阶段的独立代理相比,以边车模式运作的网络代理拥有两个无可比拟的优势:
第一个优势是它对流量的劫持是强制性的,通常是靠直接写容器的 iptables 转发表来实现。此前,独立的网络代理只有程序首先去访问它,它才能被动地为程序提供可靠通信服务,只要程序依然有选择不访问它的可能性,代理就永远只能充当服务者而不能成为管理者,上阶段的图中保留了两个容器网络设备直接连接的箭头就代表这种可能性,而这一阶段图中,服务与网络名称空间的虚线箭头代表被劫持后应用程序以为存在,但实际并不存在的流量。
另一个优势是边车代理对应用是透明的,无需对已部署的应用程序代码进行任何改动,不需要引入任何的库(这点并不是绝对的,有部分边车代理也会要求有轻量级的 SDK),也不需要程序专门去访问某个特定的网络位置。这意味着它对所有现存程序都具备开箱即用的适应性,无需修改旧程序就能直接享受到边车代理的服务,这样它的适用面就变得十分广泛。目前边车代理的代表性产品有 Linkerd、Envoy、MOSN 等。
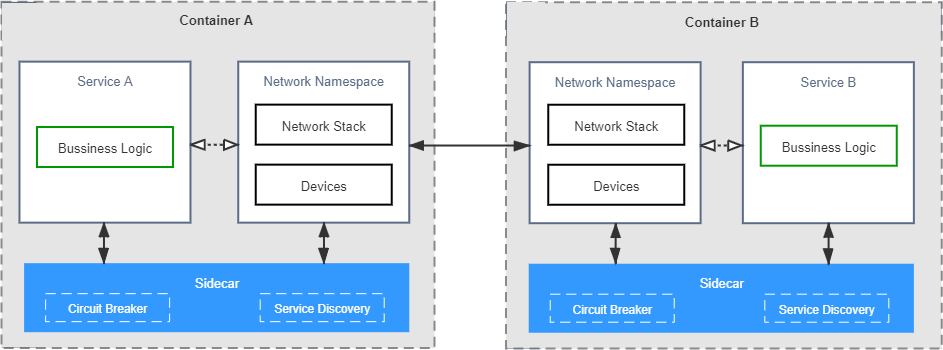
如果说边车代理还有什么不足之处的话,那大概就是来自于运维人员的不满了。边车代理能够透明且具有强制力地解决可靠通信的问题,但它本身也需要有足够的信息才能完成这项工作,譬如获取可用服务的列表,譬如得到每个服务名称对应的 IP 地址,等等。这些信息不会从天上掉下来自动到边车里去,是需要由管理员主动去告知代理,或者代理主动从约定好的位置获取。可见,管理代理本身也会产生额外的通信需求。如果没有额外的支持,这些管理方面的通信都得由运维人员去埋单,由此而生的不满便可以理解。为了管理与协调边车代理,程序间通信进化到了最后一个阶段:服务网格。
第五阶段:Service Mesh
将边车代理统一管控起来实现安全、可控、可观测的通信,将数据平面与控制平面分离开来,实现通用、透明的通信,这项工作就由专门的服务网格框架来保障。
服务网格(Service Mesh)是一个基础设施层,用于处理服务间通信。云原生应用有着复杂的服务拓扑,服务网格保证请求在这些拓扑中可靠地穿梭。在实际应用当中,服务网格通常是由一系列轻量级的网络代理组成的,它们与应用程序部署在一起,但不会被应用程序所感知,是非侵入的。
随着微服务部署被迁移到更为复杂的运行时中并使用了如 Kubernetes、Mesos 这样的编排工具进行自动化运维,我们会将网格计算中的网络管理也集约到 Service Mesh 控制台(Control Plane)上。网格计算控制台统一管理下的 SideCar 分布式架构如下图所示。我们可以看到,实际的服务流量仍然直接从代理流向代理,但是控制台知道每个代理实例的存在。控制台使得代理能够实现如访问控制、度量收集这样的功能,但这需要它们之间进行合作才能达成。
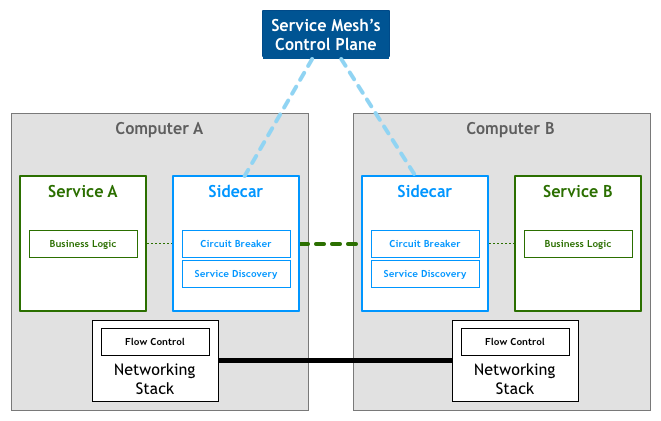
从总体架构看,服务网格包括两大块内容,分别是由一系列与微服务共同部署的边车代理,以及用于控制这些代理的管理器所构成。代理与代理之间需要通信,用以转发程序间通信的数据包;代理与管理器之间也需要通信,用以传递路由管理、服务发现、数据遥测等控制信息。服务网格使用数据平面(Data Plane)通信和控制平面(Control Plane)通信来形容这两类流量,下图中实线就表示数据平面通信,虚线表示控制平面通信。
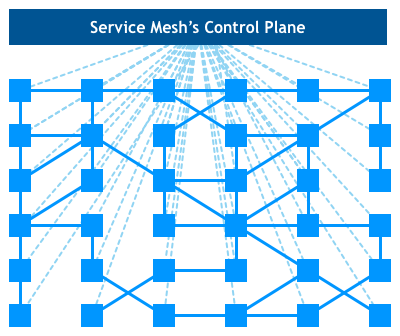
数据平面与控制平面并不是什么新鲜概念,它最初就是用在计算机网络之中的术语,通常是指网络层次的划分,软件定义网络中将解耦数据平面与控制平面作为其最主要特征之一。服务网格把计算机网络的经典概念引入到程序通信之中,既可以说是对程序通信的一种变革创新,也可以说是对网络通信的一种发展传承。
分离数据平面与控制平面的实质是将“程序”与“网络”进行解耦,将网络可能出现的问题(譬如中断后重试、降级),与可能需要的功能(譬如实现追踪度量)的处理过程从程序中拿出,放到由控制平面指导的数据平面通信中去处理,制造出一种“这些问题在程序间通信中根本不存在”的假象,仿佛网络和远程服务都是完美可靠的。这种完美的假象,让应用之间可以非常简单地交互而不必过多考虑异常情况,也能够在不同的程序框架、不同的云服务提供商环境之间平稳地迁移;同时,还能让管理者能够不依赖程序支持就得到遥测所需的全部信息,能够根据角色、权限进行统一的访问控制,这些都是服务网格的价值所在。
数据平面
在“数据平面”和“控制平面”这两节里,笔者会延续服务网格将“程序”与“网络”解耦的思路,介绍几个数据平面通信与控制平面通信中的核心问题是如何解决的。在工业界,数据平面已有 Linkerd、Nginx、Envoy 等产品,控制平面也有 Istio、Open Service Mesh、Consul 等产品,后文中笔者主要是以目前市场占有率最高的 Istio 与 Envoy 为目标进行讲述,但讲述的目的是介绍两种平面通信的技术原理,而不是介绍 Istio 和 Envoy 的功能与用法,这里涉及到的原理在各种服务网格产品中一般都是通用的,并不局限于哪一种具体实现。
数据平面由一系列边车代理所构成,核心职责是转发应用的入站(Inbound)和出站(Outbound)数据包,因此数据平面也有个别名叫转发平面(Forwarding Plane)。同时,为了在不可靠的物理网络中保证程序间通信最大的可靠性,数据平面必须根据控制平面下发策略的指导,在应用无感知的情况下自动完成服务路由、健康检查、负载均衡、认证鉴权、产生监控数据等一系列工作。为了达成上述的工作目标,至少需要妥善解决以下三个关键问题:
- 代理注入:边车代理是如何注入到应用程序中的?
- 流量劫持:边车代理是如何劫持应用程序的通信流量的?
- 可靠通信:边车代理是如何保证应用程序的通信可靠性的?
代理注入
从职责上说,注入边车代理是控制平面的工作,但从本章的叙述逻辑上,将其放在数据平面中介绍更合适。把边车代理注入到应用的过程并不一定全都是透明的,现在的服务网格产品存在有以下三种方式将边车代理接入到应用程序中:
基座模式(Chassis):这种方式接入的边车代理对程序就是不透明的,它至少会包括一个轻量级的 SDK,通信由 SDK 中的接口去处理。基座模式的好处是在程序代码的帮助下,有可能达到更好的性能,功能也相对更容易实现,但坏处是对代码有侵入性,对编程语言有依赖性。这种模式的典型产品是由华为开源后捐献给 Apache 基金会的ServiceComb Mesher。采用基座模式的接入目前并不属于主流方式,笔者也不展开介绍了。
注入模式
(Injector):根据注入方式不同,又可以分为:
- 手动注入模式:这种接入方式对使用者来说不透明,但对程序来说是透明的。由于边车代理的定义就是一个与应用共享网络名称空间的辅助容器,这天然就契合了 Pod 的设定,因此在 Kubernetes 中要进行手动注入是十分简单的——就只是为 Pod 增加一个额外容器而已,即使没有工具帮助,自己修改 Pod 的 Manifest 也能轻易办到。如果你以前未曾尝试过,不妨找一个 Pod 的配置文件,用
istioctl kube-inject -f YOUR_POD.YAML命令来查看一下手动注入会对原有的 Pod 产生什么变化。 - 自动注入模式:这种接入方式对使用者和程序都是透明的,也是 Istio 推荐的代理注入方式。在 Kubernetes 中,服务网格一般是依靠“动态准入控制”(Dynamic Admission Control)中的Mutating Webhook控制器来实现自动注入的。
- 手动注入模式:这种接入方式对使用者来说不透明,但对程序来说是透明的。由于边车代理的定义就是一个与应用共享网络名称空间的辅助容器,这天然就契合了 Pod 的设定,因此在 Kubernetes 中要进行手动注入是十分简单的——就只是为 Pod 增加一个额外容器而已,即使没有工具帮助,自己修改 Pod 的 Manifest 也能轻易办到。如果你以前未曾尝试过,不妨找一个 Pod 的配置文件,用
额外知识
istio-proxy是 Istio 对 Envoy 代理的包装容器,其中包含用 Golang 编写的
pilot-agent和用 C++编写的envoy两个进程。pilot-agent进程负责 Envoy 的生命周期管理,譬如启动、重启、优雅退出等,并维护 Envoy 所需的配置信息,譬如初始化配置,随时根据控制平面的指令热更新 Envoy 的配置等。
笔者以 Istio 自动注入边车代理(istio-proxy 容器)的过程为例,介绍一下自动注入的具体的流程。只要对 Istio 有基本了解的同学都知道,对任何设置了istio-injection=enabled标签的名称空间,Istio 都会自动为其中新创建的 Pod 注入一个名为 istio-proxy 的容器。之所以能做到自动这一点,是因为 Istio 预先在 Kubernetes 中注册了一个类型为MutatingWebhookConfiguration的资源,它的主要内容如下所示:
apiVersion: admissionregistration.k8s.io/v1beta1
kind: MutatingWebhookConfiguration
metadata:
name: istio-sidecar-injector
.....
webhooks:
- clientConfig:
service:
name: istio-sidecar-injector
namespace: istio-system
path: /inject
name: sidecar-injector.istio.io
namespaceSelector:
matchLabels:
istio-injection: enabled
rules:
- apiGroups:
- ""
apiVersions:
- v1
operations:
- CREATE
resources:
- pods以上配置告诉 Kubernetes,对于符合标签istio-injection: enabled的名称空间,在 Pod 资源进行 CREATE 操作时,应该先自动触发一次 Webhook 调用,调用的位置是istio-system名称空间中的服务istio-sidecar-injector,调用具体的 URL 路径是/inject。在这次调用中,Kubernetes 会把拟新建 Pod 的元数据定义作为参数发送给此 HTTP Endpoint,然后从服务返回结果中得到注入了边车代理的新 Pod 定义,以此自动完成注入。
流量劫持
边车代理做流量劫持最典型的方式是基于 iptables 进行的数据转发,笔者曾在“Linux 网络虚拟化”中介绍过 Netfilter 与 iptables 的工作原理。这里仍然以 Istio 为例,它在注入边车代理后,除了生成封装 Envoy 的 istio-proxy 容器外,还会生成一个 initContainer,它的作用就是自动修改容器的 iptables,具体内容如下所示:
initContainers:
image: docker.io/istio/proxyv2:1.5.1
name: istio-init
- command:
- istio-iptables -p "15001" -z "15006"-u "1337" -m REDIRECT -i '*' -x "" -b '*' -d 15090,15020以上命令行中的istio-iptables是 Istio 提供的用于配置 iptables 的 Shell 脚本,这行命令的意思是让边车代理拦截所有的进出 Pod 的流量,包括的动作为:拦截除 15090、15020 端口(这两个分别是 Mixer 和 Ingress Gateway 的端口,关于 Istio 占用的固定端口可参考官方文档所列)外的所有入站流量,全部转发至 15006 端口(Envoy 入站端口),经 Envoy 处理后,再从 15001 端口(Envoy 出站端口)发送出去。该命令会在 iptables 中的 PREROUTING 和 OUTPUT 链中挂载相应的转发规则,以使用iptables -t nat -L -v命令可以查看到如下所示配置信息:
Chain PREROUTING
pkts bytes target prot opt in out source destination
2701 162K ISTIO_INBOUND tcp -- any any anywhere anywhere
Chain OUTPUT
pkts bytes target prot opt in out source destination
15 900 ISTIO_OUTPUT tcp -- any any anywhere anywhere
Chain ISTIO_INBOUND (1 references)
pkts bytes target prot opt in out source destination
0 0 RETURN tcp -- any any anywhere anywhere tcp dpt:ssh
2 120 RETURN tcp -- any any anywhere anywhere tcp dpt:15090
2699 162K RETURN tcp -- any any anywhere anywhere tcp dpt:15020
0 0 ISTIO_IN_REDIRECT tcp -- any any anywhere anywhere
Chain ISTIO_IN_REDIRECT (3 references)
pkts bytes target prot opt in out source destination
0 0 REDIRECT tcp -- any any anywhere anywhere redir ports 15006
Chain ISTIO_OUTPUT (1 references)
pkts bytes target prot opt in out source destination
0 0 RETURN all -- any lo 127.0.0.6 anywhere
0 0 ISTIO_IN_REDIRECT all -- any lo anywhere !localhost owner UID match 1337
0 0 RETURN all -- any lo anywhere anywhere ! owner UID match 1337
15 900 RETURN all -- any any anywhere anywhere owner UID match 1337
0 0 ISTIO_IN_REDIRECT all -- any lo anywhere !localhost owner GID match 1337
0 0 RETURN all -- any lo anywhere anywhere ! owner GID match 1337
0 0 RETURN all -- any any anywhere anywhere owner GID match 1337
0 0 RETURN all -- any any anywhere localhost
0 0 ISTIO_REDIRECT all -- any any anywhere anywhere
Chain ISTIO_REDIRECT (1 references)
pkts bytes target prot opt in out source destination
0 0 REDIRECT tcp -- any any anywhere anywhere redir ports 15001用 iptables 进行流量劫持是最经典、最通用的手段,不过,iptables 重定向流量必须通过回环设备(Loopback)交换数据,流量不得不多穿越一次协议栈,如图 15-6 所示。
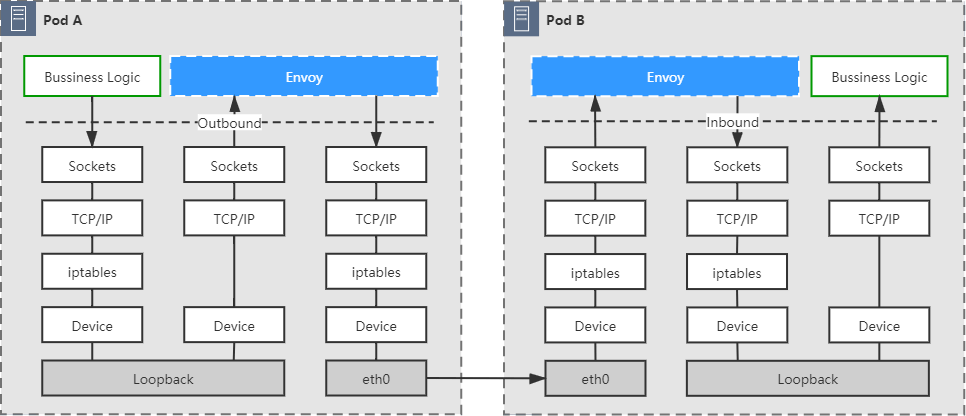
图 15-6 经过 iptables 转发的通信
这种方案在网络 I/O 不构成主要瓶颈的系统中并没有什么不妥,但在网络敏感的大并发场景下会因转发而损失一定的性能。目前,如何实现更优化的数据平面流量劫持,是服务网格发展的前沿研究课题之一,其中一种可行的优化方案是使用eBPF(Extended Berkeley Packet Filter)技术,在 Socket 层面直接完成数据转发,而不需要再往下经过更底层的 TCP/IP 协议栈的处理,从而减少数据在通信链路的路径长度。
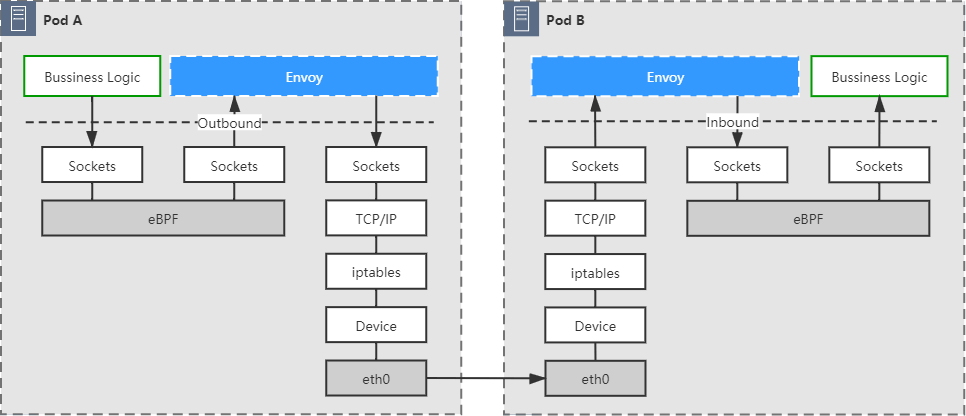
图 15-7 经过 eBPF 直接转发的通信
另一种可以考虑的方案是让服务网格与 CNI 插件配合来实现流量劫持,譬如 Istio 就有提供自己实现的 CNI 插件。只要安装了这个 CNI 插件,整个虚拟化网络都由 Istio 自己来控制,那自然就无需再依赖 iptables,也不必存在 initContainers 配置和 istio-init 容器了。这种方案有很高的上限与自由度,不过,要实现一个功能全面、管理灵活、性能优秀、表现稳定的 CNI 网络插件决非易事,连 Kubernetes 自己都迫不及待想从网络插件中脱坑,其麻烦程度可见一斑,因此目前这种方案使用得也并不算广泛。
流量劫持技术的发展与服务网格的落地效果密切相关,有一些服务网格通过基座模式中的 SDK 也能达到很好的转发性能,但考虑到应用程序通用性和环境迁移等问题,无侵入式的低时延、低管理成本的流量劫持方案仍然是研究的主流方向。
可靠通信
注入边车代理,劫持应用流量,最终的目的都是为了代理能够接管应用程序的通信,然而,代理接管了应用的通信之后,它会做什么呢?这个问题的答案是:不确定。代理的行为需要根据控制平面提供的策略来决定,传统的代理程序,譬如 HAProxy、Nginx 是使用静态配置文件来描述转发策略的,这种静态配置很难跟得上应用需求的变化与服务扩缩时网络拓扑结构的变动。Envoy 在这方面进行了创新,它将代理的转发的行为规则抽象成 Listener、Router、Cluster 三种资源,以此为基础,又定义了应该如何发现和访问这些资源的一系列 API,现在这些资源和 API 被统称为“xDS 协议族”。自此以后,数据平面就有了如何描述各种配置和策略的事实标准,控制平面也有了与控制平面交互的标准接口。目前 xDS v3.0 协议族已经包含有以下具体协议:
表 15-1 xDS v3.0 协议族
| 简称 | 全称 | 服务描述 |
|---|---|---|
| LDS | Listener Discovery Service | 监听器发现服务 |
| RDS | Route Discovery Service | 路由发现服务 |
| CDS | Cluster Discovery Service | 集群发现服务 |
| EDS | Endpoint Discovery Service | 集群成员发现服务 |
| ADS | Aggregated Discovery Service | 聚合发现服务 |
| HDS | Health Discovery Service | 健康度发现服务 |
| SDS | Secret Discovery Service | 密钥发现服务 |
| MS | Metric Service | 度量指标服务 |
| RLS | Rate Limit Service | 速率限制服务 |
| ALS | gRPC Access Log Service | gRPC 访问日志服务 |
| LRS | Load Reporting service | 负载报告服务 |
| RTDS | Runtime Discovery Service | 运行时发现服务 |
| CSDS | Client Status Discovery Service | 客户端状态发现服务 |
| ECDS | Extension Config Discovery Service | 扩展配置发现服务 |
笔者不能逐一介绍这些协议,但可以说明清楚它们一致的运作原理,其中的关键是解释清楚这些协议的共同基础,即 Listener、Router、Cluster 三种资源的具体含义:
- Listener:Listener 可以简单理解为 Envoy 的一个监听端口,用于接收来自下游应用程序(Downstream)的数据。Envoy 能够同时支持多个 Listener,不同的 Listener 之间的策略配置是相互隔离的。
自动发现 Listener 的服务被称为 LDS(Listener Discovery Service),它是所有其他 xDS 协议的基础,如果没有 LDS(也没有在 Envoy 启动时静态配置 Listener 的话),其他所有 xDS 服务也就失去了意义,因为没有监听端口的 Envoy 不能为任何应用提供服务。 - Cluster:Cluster 是 Envoy 能够连接到的一组逻辑上提供相同服务的上游(Upstream)主机。Cluster 包含该服务的连接池、超时时间、Endpoints 地址、端口、类型等信息。具体到 Kubernetes 环境下,可以认为 Cluster 与 Service 是对等的概念,Cluster 实际上承担了服务发现的职责。
自动发现 Cluster 的服务被称为 CDS(Cluster Discovery Service),通常情况下,控制平面会将它从外部环境中获取的所有可访问服务全量推送给 Envoy。与 CDS 紧密相关的另一种服务是 EDS(Endpoint Discovery Service)。当 Cluster 的类型被标识为需要 EDS 时,则说明该 Cluster 的所有 Endpoints 地址应该由 xDS 服务下发,而不是依靠 DNS 服务去解析。 - Router:Listener 负责接收来自下游的数据,Cluster 负责将数据转发送给上游的服务,而 Router 则决定 Listener 在接收到下游的数据之后,具体应该将数据交给哪一个 Cluster 处理,由此定义可知,Router 实际上是承担了服务网关的职责。
自动发现 Router 的服务被称为 RDS(Router Discovery Service),Router 中最核心信息是目标 Cluster 及其匹配规则,即实现网关的路由职能。此外,视 Envoy 中的插件配置情况,也可能包含重试、分流、限流等动作,实现网关的过滤器职能。
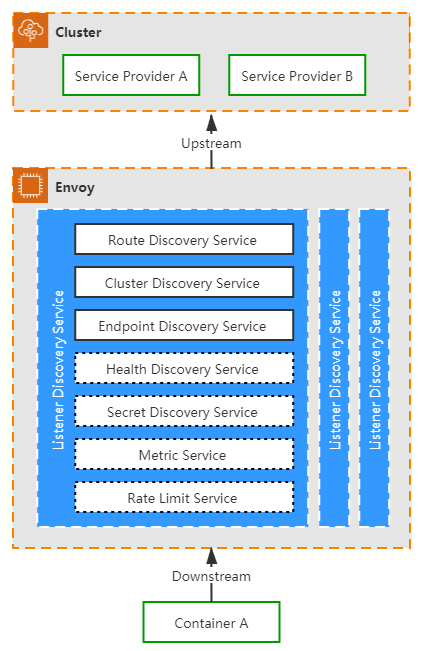
图 15-8 xDS 协议运作模型
Envoy 的另外一个设计重点是它的 Filter 机制,Filter 通俗地讲就是 Envoy 的插件,通过 Filter 机制 Envoy 提供了强大的可扩展能力,插件不仅是无关重要的外围功能,很多 Envoy 的核心功能都使用 Filter 来实现的。譬如对 HTTP 流量的治理、Tracing 机制、多协议支持,等等。利用 Filter 机制,Envoy 理论上可以实现任意协议的支持以及协议之间的转换,可以对请求流量进行全方位的修改和定制,同时还保持较高的可维护性。
控制平面
如果说数据平面是行驶中的车辆,那控制平面就是车辆上的导航系统;如果说数据平面是城市的交通道路,那控制平面就是路口的指示牌与交通信号灯。控制平面的特点是不直接参与程序间通信,而只会与数据平面中的代理通信,在程序不可见的背后,默默地完成下发配置和策略,指导数据平面工作。由于服务网格(暂时)没有大规模引入计算机网络中管理平面(Management Plane)等其他概念,所以控制平面通常也会附带地实现诸如网络行为的可视化、配置传输等一系列管理职能(其实还是有专门的管理平面工具的,譬如Meshery、ServiceMeshHub)。笔者仍然以 Istio 为例具体介绍一下控制平面的主要功能。
Istio 在 1.5 版本之前,Istio 自身也是采用微服务架构开发的,将控制平面的职责分解为 Mixer、Pilot、Galley、Citadel 四个模块去实现,其中 Mixer 负责鉴权策略与遥测;Pilot 负责对接 Envoy 的数据平面,遵循 xDS 协议进行策略分发;Galley 负责配置管理,为服务网格提供外部配置感知能力;Citadel 负责安全加密,提供服务和用户层面的认证和鉴权、管理凭据和 RBAC 等安全相关能力。不过,经过两、三年的实践应用,很多用户都有反馈 Istio 的微服务架构有过度设计的嫌疑,lstio 在定义项目目标时,曾非常理想化的提出控制平面的各个组件都应可以独立部署,然而在实际应用场景里却并非如此,独立的组件反而带来了部署复杂、职责划分不清晰等问题。
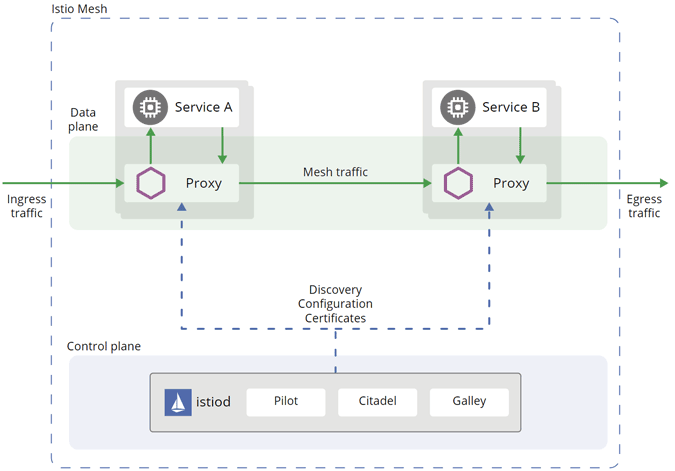
图 15-9 Istio 1.5 版本之后的架构(图片来自Istio 官方文档)
从 1.5 版本起,Istio 重新回归单体架构,将 Pilot、Galley、Citadel 的功能全部集成到新的 Istiod 之中。当然,这也并不是说完全推翻之前的设计,只是将原有的多进程形态优化成单进程的形态,之前各个独立组件变成了 Istiod 的内部逻辑上的子模块而已。单体化之后出现的新进程 Istiod 就承担所有的控制平面职责,具体包括有:
数据平面交互
:这是部分是满足服务网格正常工作所需的必要工作,具体有:
- 边车注入:在 Kubernetes 中注册 Mutating Webhook 控制器,实现代理容器的自动注入,并生成 Envoy 的启动配置信息。
- 策略分发:接手了原来 Pilot 的核心工作,为所有的 Envoy 代理提供符合 xDS 协议的策略分发的服务。
- 配置分发:接手了原来 Galley 的核心工作,负责监听来自多种支持配置源的数据,譬如 kube-apiserver,本地配置文件,或者定义为网格配置协议(Mesh Configuration Protocol,MCP)的配置信息。原来 Galley 需要处理的 API 校验和配置转发功能也包含在内。
流量控制
:这通常是用户使用服务网格的最主要目的,具体包括以下几个方面:
- 请求路由:通过VirtualService、DestinationRule等 Kubernetes CRD 资源实现了灵活的服务版本切分与规则路由。譬如根据服务的迭代版本号(如 v1.0 版、v2.0 版)、根据部署环境(如 Development 版、Production 版)作为路由规则来控制流量,实现诸如金丝雀发布这类应用需求。
- 流量治理:包括熔断、超时、重试等功能,譬如通过修改 Envoy 的最大连接数,实现对请求的流量控制;通过修改负载均衡策略,在轮询、随机、最少访问等方式间进行切换;通过设置异常探测策略,将满足异常条件的实例从负载均衡池中摘除,以保证服务的稳定性,等等。
- 调试能力:包括故障注入和流量镜像等功能,譬如在系统中人为的设置一些故障,来测试系统的容错稳定性和系统恢复的能力。又譬如通过复制一份请求流量,把它发送到镜像服务,从而满足A/B 验证的需要。
通信安全
:包括通信中的加密、凭证、认证、授权等功能,具体有:
可观测性
:包括日志、追踪、度量三大块能力,具体有:
- 日志收集:程序日志的收集并不属于服务网格的处理范畴,通常会使用 ELK Stack 去完成,这里是指远程服务的访问日志的收集,对等的类比目标应该是以前 Nginx、Tomcat 的访问日志。
- 链路追踪:为请求途经的所有服务生成分布式追踪数据并自动上报,运维人员可以通过 Zipkin 等追踪系统从数据中重建服务调用链,开发人员可以借此了解网格内服务的依赖和调用流程。
- 指标度量:基于四类不同的监控标识(响应延迟、流量大小、错误数量、饱和度)生成一系列观测不同服务的监控指标,用于记录和展示网格中服务状态。
## 服务网格与生态
服务网格目前仍然处于技术浪潮的早期,但其价值已被业界所普遍认可,几乎所有希望能够影响云原生发展方向的企业都已参与进来。从最早 2016 年的[Linkerd](https://linkerd.io/)和[Envoy](https://www.envoyproxy.io/),到 2017 年 Google、IBM 和 Lyft 共同发布的 Istio,再到后来 CNCF 将 Buoyant 的[Conduit](https://conduit.io/)改名为[Linkerd2](https://linkerd.io/2/overview/)再度参与 Istio 竞争。2018 年后,服务网格的话语权争夺战已全面升级至由云计算巨头直接主导,Google 将 Istio 搬上 Google Cloud Platform,推出了 Istio 的公有云托管版本 Google Cloud Service Mesh,亚马逊推出了用于 AWS 的 App Mesh、微软推出了 Azure 完全托管版本的 Service Fabric Mesh,发布了自家的控制平面[Open Service Mesh](https://openservicemesh.io/) ,国内的阿里巴巴也推出了基于 Istio 的修改版[SOFAMesh](https://github.com/sofastack/sofa-mesh),并开源了自己研发的[MOSN](https://mosn.io/)代理,可以说,云计算的所有玩家都正在布局服务网格生态。
市场繁荣的同时也带来了碎片化的问题,一个技术领域形成能被业界普遍承认的规范标准,是这个领域从分头研究、各自开拓的萌芽状态,走向工业化生产应用的成熟状态的重要标志,标准的诞生可以说是每一项技术普及之路中都必须经历的“成人礼”。前面我们曾接触过容器运行时领域的 CRI 规范、容器网络领域的 CNI 规范、容器存储领域的 CSI 规范,尽管服务网格诞生至今仅有数年时间,但作为微服务、云原生的前沿热点,它也正在酝酿自己的标准规范,既本节的主角:[服务网格接口](https://smi-spec.io/)(Service Mesh Interface,SMI)与[通用数据平面 API](https://github.com/cncf/udpa)(Universal Data Plane API,UDPA),它们两者的关系如下图所示。
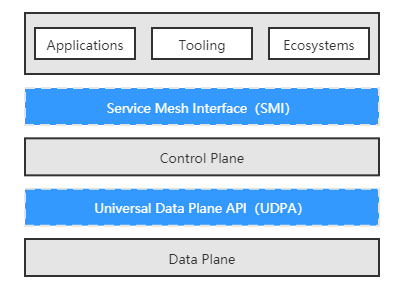
图 15-10 SMI 规范与 UDPA 规范
服务网格实质上是数据平面产品与控制平面产品的集合,所以在规范制订方面,很自然地也分成了两类:SMI 规范提供了外部环境(实际上就是 Kubernetes)与控制平面交互的标准,使得 Kubernetes 及在其之上的应用能够无缝地切换各种服务网格产品。UDPA 规范则提供了控制平面与数据平面交互的标准,使得服务网格产品能够灵活地搭配不同的边车代理,针对不同场景的需求,发挥各款边车代理的功能或者性能优势。这两个规范并没有重叠,它们的关系与在容器运行时中介绍到的 CRI 和 OCI 规范之间的关系颇有些相似。
### 服务网格接口
2019 年 5 月的 KubeCon 大会上,微软联合 Linkerd、HashiCorp、Solo、Kinvolk 和 Weaveworks 等一批云原生服务商共同宣布了 Service Mesh Interface 规范,希望能在各家的服务网格产品之上建立一个抽象的 API 层,然后通过这个抽象来解耦和屏蔽底层服务网格实现,让上层的应用、工具、生态系统可以建立在同一个业界标准之上,从而实现应用程序在不同服务网格产品之间的无缝移植与互通。
如果你更熟悉 Istio 的话,不妨把 SMI 的作用理解为它提供了一套 Istio 中[VirtualService](https://istio.io/latest/zh/docs/reference/config/networking/virtual-service/#VirtualService) 、[DestinationRule](https://istio.io/latest/zh/docs/concepts/traffic-management/#destination-rules)、[Gateway](https://istio.io/latest/zh/docs/reference/config/networking/gateway/)等私有概念对等的行业标准版本,只要使用 SMI 中定义的标准资源,应用程序就可以在不同的控制平面上灵活迁移,唯一的要求是这些控制平面都支持了 SMI 规范。
SMI 与 Kubernetes 是彻底绑定的,规范的落地执行完全依靠在 Kubernetes 中部署 SMI 定义的 CRD 来实现,这一点在 SMI 的目标中被形容为“Kubernetes Native”,说明微软等云服务厂商已经认定容器编排领域不会有 Kubernetes 之外的候选项了,这也是微软选择在 KubeCon 大会上公布 SMI 规范的原因。但是在另外一端 ,SMI 并不与包括行业第一的 Istio 或者微软自家 Open Service Mesh 在内的任何控制平面所绑定,这点在 SMI 的目标中被形容为“Provider Agnostic”,说明微软务实地看到了服务网格领域处于群雄混战的现状。Provider Agnostic 对消费者有利,但对目前处于行业领先地位的 Istio 肯定是不利的,所以 SMI 并没有得到 Istio 及其背后的 Google、IBM 与 Lyft 的支持也就完全可以理解。
在过去两年里,Istio 无论是发展策略上还是设计上(过度设计)的风评并不算好,业界一直在期待 Google 和 Istio 能做出改进,这种期待在持续两年的失望之后,已经有很多用户在考虑 Istio 以外的选择了。SMI 一发布就吸引了除了 Istio 之外几乎所有的服务网格玩家参与进来了,恐怕并不仅仅是因为微软号召力巨大的缘故。为了对抗 Istio 的抵制,SMI 自己还提供了一个[Istio 的适配器](https://github.com/servicemeshinterface/smi-adapter-istio),以便使用 Istio 的程序能平滑地迁移的 SMI 之上,所以遗留代码并不能为 Istio 构建出特别坚固的壁垒。
2020 年 4 月,SMI 被托管到 CNCF,成为其中的一个 Sandbox 项目(Sandbox 是最低级别的项目,CNCF 只提供有限度的背书),如果能够经过孵化、毕业阶段的话,SMI 就有望成为公认的行业标准,这也是开源技术社区里民主管理的一点好处。
图 15-11 SMI 规范的参与者
讲述了 SMI 的背景与价值,笔者再简要介绍一下 SMI 的主要内容。目前([v0.5 版本](https://github.com/servicemeshinterface/smi-spec/blob/master/SPEC_LATEST_STABLE.md))的 SMI 规范包括四方面的 API 构成,分别是:
- **流量规范**(Traffic Specs):目标是定义流量的表示方式,譬如 TCP 流量、HTTP/1 流量、HTTP/2 流量、gRPC 流量、WebSocket 流量等该如何在配置中抽象及使用。目前 SMI 只提供了 TCP 和 HTTP 流量的直接支持,而且都比较简陋,譬如 HTTP 流量的路由中甚至连以 Header 作为判断条件都不支持。这暂时只能自我安慰地解释为 SMI 在流量协议的扩展方面是完全开放的,没有功能也有可能自己扩充,哪怕不支持的或私有协议的流量也有可能使用 SMI 来管理。流量表示是做路由和访问控制的必要基础,因为必须要根据流量中的特征为条件才能进行转发和控制,流量规范中已经自带了路由能力,访问控制则被放到独立的规范中去实现。
- **流量拆分**(Traffic Split):目标是定义不同版本服务之间的流量比例,提供流量治理的能力,譬如限流、降级、容错,等等,以满足灰度发布、A/B 测试等场景。SMI 的流量拆分是直接基于 Kubernetes 的 Service 资源来设置的,这样做的好处是使用者不需要去学习理解新的概念,而坏处是要拆分流量就必须定义出具有层次结构的 Service,即 Service 后面不是 Pod,而是其他 Service。而 Istio 中则是设计了 VirtualService 这样的新概念来解决相同的问题,通过 Subset 来拆分流量。至于两者孰优孰劣,这就见仁见智了。
- **流量度量**(Traffic Metrics):目标是为资源提供通用集成点,度量工具可以通过访问这些集成点来抓取指标。这部分完全遵循了 Kubernetes 的[Metrics API](https://kubernetes.io/docs/tasks/debug-application-cluster/resource-metrics-pipeline/)进行扩充。
- **流量访问控制**(Traffic Access Control):目标是根据客户端的身份配置,对特定的流量访问特定的服务提供简单的访问控制。SMI 绑定了 Kubernetes 的 ServiceAccount 来做服务身份访问控制,这里说的“简单”不是指它使用简单,而是说它只支持 ServiceAccount 一种身份机制,在正式使用中这恐怕是不足以应付所有场景的,日后应该还需要继续扩充。
这些四种 API 目前暂时均是 Alpha 版本,意味着它们还未成熟,随时可能发生变动。从目前版本来看,至少与 Istio 的私有 API 相比,SMI 没有看到明显优势,不过考虑 SMI 还处于项目早期阶段,不够强大也情有可原,希望未来 SMI 可以成长为一个足够坚实可用的技术规范,这有助于避免数据平面出现一家独大的情况,有利于竞争与发展。
### 通用数据平面 API
同样是 2019 年 5 月,CNCF 创立了一个名为“通用数据平面 API 工作组”(Universal Data Plane API Working Group,UDAP-WG)的组织,工作目标是制定类似于软件定义网络中 OpenFlow 协议的数据平面交互标准。工作组的名字被敲定的那一刻,就已经决定了所产出的标准名字必定叫“通用数据平面 API”(Universal Data Plane API,UDPA)。
如果不纠结于是否足够标准、是否由足够权威的组织来制定的话,上一节介绍数据平面时提到的 Envoy xDS 协议族其实就已经完全满足了控制平面与数据平面交互的需要。事实上,Envoy 正是 UDPA-WG 工作组的主要成员,在 2019 年 11 月的 EnvoyCon 大会上,Envoy 的核心开发者、UDPA 的负责人之一,来自 Google 公司的 Harvey Tuch 做了一场以“[The Universal Dataplane API:Envoy’s Next Generation APIs](https://envoycon2019.sched.com/event/UxwL/the-universal-dataplane-api-udpa-envoys-next-generation-apis-harvey-tuch-google)”为题的演讲,详细而清晰地说明了 xDS 与 UDAP 之间的关系:UDAP 的研发就是基于 xDS 的经验为基础的,在未来 xDS 将逐渐向 UDPA 靠拢,最终将基于 UDPA 来实现。
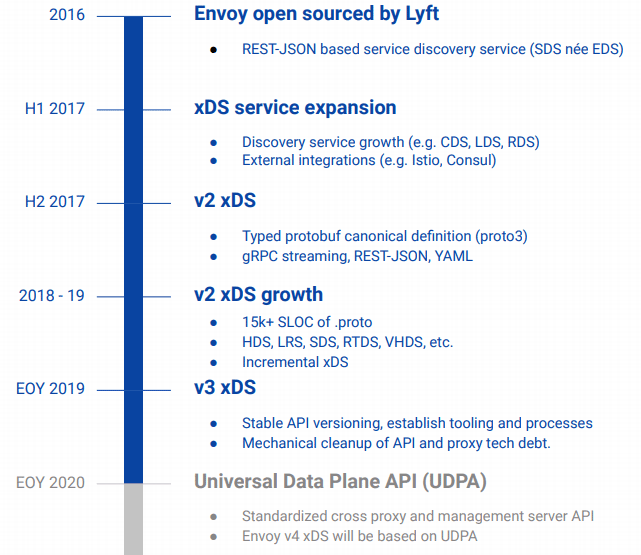
图 15-12 UDPA 规范与 xDS 协议融合时间表([图片来源](https://envoycon2019.sched.com/event/UxwL/the-universal-dataplane-api-udpa-envoys-next-generation-apis-harvey-tuch-google))
图 15-12 是笔者在 Harvey Tuch 演讲 PPT 中截取的 UDAP 与 xDS 的融合时间表,在演讲中 Harvey Tuch 还提到了 xDS 协议的演进节奏会定为每年推出一个大版本、每个版本从发布到淘汰起要经历 Alpha、Stable、Deprecated、Removed 四个阶段、每个阶段持续一年时间,简单地说就是每个大版本 xDS 在被淘汰前会有三年的固定生命周期。基于 UDPA 的 xDS v4 API 原本计划会在 2020 年发布,进入 Alpha 阶段,不过,笔者写下这段文字的时间是 2020 年的 10 月中旬,已经可以肯定地说上面所列的计划必然破产,因为从目前公开的资料看来,UDPA 仍然处于早期设计阶段,距离完备都尚有一段很长的路程,所以基于 UDPA 的 xDS v4 在 2020 年是铁定出不来了。
在规范内容方面,由于 UDAP 连 Alpha 状态都还未能达到,目前公开的资料还很少。从 GitHub 和 Google 文档上能找到部分设计原型文件来看,UDAP 的主要内容会分为传输协议(UDPA-TP,TransPort)和数据模型(UDPA-DM,Data Model)两部分,这两部分是独立设计的,以后完全有可能会出现不同的数据模型共用同一套传输协议的可能性。
### 服务网格生态
2016 年“Service Mesh”一词诞生至今不过短短四年时间,服务网格已经从研究理论变成了在工业界中广泛采用的技术,用户的态度也从观望走向落地生产。目前,服务网格市场已形成了初步的生态格局,尽管还没有决出最终的胜利者,但已经能基本看清这个领域里几个有望染指圣杯的玩家。下面,笔者按数据平面和控制平面,分别介绍一下目前服务网格产品的主要竞争者,在数据平面的产品有。
- **Linkerd**:2016 年 1 月发布的[Linkerd](https://github.com/linkerd/linkerd)是服务网格的鼻祖,使用 Scala 语言开发的 Linkerd-proxy 也就成为了业界第一款正式的边车代理。一年后的 2017 年 1 月,Linkerd 成功进入 CNCF,成为云原生基金会的孵化项目,但此时的 Linkerd 其实已经显露出了明显的颓势:由于 Linkerd-proxy 运行需要 Java 虚拟机的支持,在启动时间、预热、内存消耗等方面,相比起晚它半年发布的挑战者 Envoy 均处于全面劣势,因而很快 Linkerd 就被 Istio 与 Envoy 的组合所击败,结束了它短暂的统治期。
- **Envoy**:2016 年 9 月开源的[Envoy](https://github.com/envoyproxy/envoy)是目前边车代理产品中市场占有率最高的一款,已经在很多个企业的生产环境里经受过大量检验。Envoy 最初由 Lyft 公司开发,后来 Lyft 与 Google 和 IBM 三方达成合作协议,Envoy 就成了 Istio 的默认数据平面。Envoy 使用 C++语言实现,比起 Linkerd 在资源消耗方面有了明显的改善。此外,由于采用了公开的 xDS 协议进行控制,Envoy 并不只为 Istio 所私有,这个特性让 Envoy 被很多其他的管理平面选用,为它夺得市场占有率桂冠做出了重要贡献。2017 年 9 月,Envoy 加入 CNCF,成为 CNCF 继 Linkerd 之后的第二个数据平面项目。
- **nginMesh**:2017 年 9 月,在 NGINX Conf 2017 大会上,Nginx 官方公布了基于著名服务器产品 Nginx 实现的边车代理[nginMesh](https://github.com/nginxinc/nginmesh)。nginMesh 使用 C 语言开发(有部分模块用了 Golang 和 Rust),是 Nginx 从网络通信踏入程序通信的一次重要尝试。Nginx 在网络通信和流量转发方面拥有其他厂商难以匹敌的成熟经验,本该成为数据平面的有力竞争者才对。然而结果却是 Nginx 在这方面投入资源有限,方向摇摆,让 nginMesh 的发展一直都不温不火,到了 2020 年,nginMesh 终于宣告失败,项目转入“非活跃”(No Longer Under Active)状态。
- **Conduit/Linkerd 2**:2017 年 12 月,在 KubeCon 大会上,Buoyant 公司发布了 Conduit 的 0.1 版本,这是 Linkerd-proxy 被 Envoy 击败后,Buoyant 公司使用 Rust 语言重新开发的第二代的服务网格产品,最初是以 Conduit 命名,在 Conduit 加入 CNCF 后不久,宣布与原有的 Linkerd 项目合并,被重新命名为[Linkerd 2](https://github.com/linkerd/linkerd2)(这样就只算一个项目了)。使用 Rust 重写后,[Linkerd2-proxy](https://github.com/linkerd/linkerd2-proxy)的性能与资源消耗方面都已不输 Envoy,但它的定位通常是作为 Linkerd 2 的专有数据平面,成功与否很大程度上取决于 Linkerd 2 的发展如何。
- **MOSN**:2018 年 6 月,来自蚂蚁金服的[MOSN](https://github.com/mosn/mosn)宣布开源,MOSN 是 SOFAStack 中的一部分,使用 Golang 语言实现,在阿里巴巴及蚂蚁金服中经受住了大规模的应用考验。由于 MOSN 是阿里技术生态的一部分,对于使用了 Dubbo 框架,或者 SOFABolt 这样的 RPC 协议的微服务应用,MOSN 往往能够提供些额外的便捷性。2019 年 12 月,MOSN 也加入了[CNCF Landscape](https://landscape.cncf.io/)。
以上介绍的是知名度和使用率最高的一部分数据平面,笔者在选择时也考虑了不同程序语言实现的代表性,其他的未提及的数据平面还有[HAProxy Connect](https://github.com/haproxytech/haproxy-consul-connect)、[Traefik](https://github.com/traefik/traefik)、[ServiceComb Mesher](https://github.com/apache/servicecomb-mesher)等等,就不再逐一介绍了。除了数据平面,服务网格中另外一条争夺激烈的战线是控制平面产品,主要有包括有以下产品。
- **Linkerd 2**:Buoyant 公司的服务网格产品,无论是数据平面抑或是控制平面均使采用了“Linkerd”和“Linkerd 2”的名字。现在 Linkerd 2 的身份已经从领跑者变成了 Istio 的挑战者,虽然代理的性能已赶上了 Envoy,但功能上 Linkerd 2 仍不足以与 Istio 媲美,在 mTLS、多集群支持、支持流量拆分条件的丰富程度等方面 Istio 都比 Linkerd 2 要更有优势,毕竟两者背后的研发资源并不对等,一方是创业公司 Buoyant,另一方是 Google、IBM 等巨头。然而,相比起 Linkerd 2,Istio 的缺点很大程度上也是由于其功能丰富带来的,真的每个用户都需要支持非 Kubernetes 环境、支持多集群单控制平面、支持切换不同的数据平面等这类特性吗?在满足需要的前提下,更小的功能集合往往意味着更高的性能与易用性。
- **Istio**:Google、IBM 和 Lyft 公司联手打造的产品,以自己的 Envoy 为默认数据平面。Istio 是目前功能最强大的服务网格,如果你苦恼于这方面产品的选型,直接挑选 Istio 不一定是最合适的,但起码能保证应该是不会有明显缺陷的选择;同时 Istio 也是市场占有率第一的控制平面,不少公司的发布的服务网格产品都是在它基础上派生增强而来,譬如蚂蚁金服的 SOFAMesh、Google Cloud Service Mesh 等。不过,服务网格毕竟比容器运行时、容器编排要年轻,Istio 在服务网格领域尽管占有不小的优势,但统治力还远远不能与容器运行时领域的 Docker 和容器编排领域的 Kubernetes 相媲美。
- **Consul Connect**:Consul Connect 是来自 HashiCorp 公司的服务网格,Consul Connect 的目标是将现有由 Consul 管理的集群平滑升级为服务网格的解决方案。如同 Connect 这个名字所预示的“链接”含义,Consul Connect 十分强调它整合集成的角色定位,不与具体的网络和运行平台绑定,可以切换多种数据平面(默认为 Envoy),支持多种运行平台,譬如 Kubernetest、Nomad 或者标准的虚拟机环境。
- **OSM**:Open Service Mesh(OSM)是微软公司在 2020 年 8 月开源的服务网格,同样以 Envoy 为数据平面。OSM 项目的其中一个主要目标是作为 SMI 规范的参考实现。同时,为了与强大却复杂的 Istio 进行差异化竞争,OSM 明确以“轻量简单”为卖点,通过减少边缘功能和对外暴露的 API 数量,降低服务网格的学习使用成本。现在服务网格正处于群雄争霸的战国时期,世界三大云计算厂商中,亚马逊的 AWS App Mesh 走的是专有闭源的发展路线,剩下就只有微软与 Google 具有相似体量,能够对等地掰手腕。但它们又选择了截然不同的竞争策略:OSM 开源后,微软马上将其捐献给 CNCF,成为开源社区的一部分;与此相对,尽管 CNCF 与 Istio 都有着 Google 的背景关系,但 Google 却不惜违反与 IBM、Lyft 之间的协议,拒绝将 Istio 托管至 CNCF,而是自建新组织转移了 Istio 的商标所有权,这种做法不出意外地遭到开源界的抗议,让观众产生了一种微软与 Google 身份错位的感觉,在云计算的激烈竞争中,似乎已经再也分不清楚谁是恶龙、谁是屠龙少年了。
上面未提到的控制平面还有许多,譬如[Traefik Mesh](https://traefik.io/traefik-mesh/)、[Kuma](https://github.com/kumahq/kuma)等等,就不再展开介绍了。服务网格也许是未来的发展方向,但想要真正发展成熟并大规模落地还有很长的一段路要走。一方面,相当多的程序员已经习惯了通过代码与组件库去进行微服务治理,并且已经积累了很多的经验,也能把产品做得足够成熟稳定,因此对服务网格的需求并不迫切;另一方面,目前服务网格产品的成熟度还有待提高,冒险迁移过于激进,也容易面临兼容性的问题。也许要等到服务网格开始远离市场宣传的喧嚣,才会走向真正的落地。